张兴福1,魏德宏1,余旭1,吴江淮2
( 1. 广东工业大学测绘工程系,广东广州510006; 2. 广州市城市规划勘测设计研究院,广东广州510006)
一、引言
GPS RTK 技术已经被广泛应用到工程测量的各个领域,如地形图测绘、线路纵横断面图测量、施工放样以及水下地形测量等。GPS RTK 测量可实时获得流动站相对于基准站的WGS-84 坐标系下的三维基线向量和相应的精度信息。根据基准站的坐标可获得流动站对应基准站的坐标,而基准站的坐标获取一般通过两种方法: ① 通过现场进行单点定位;② 若该点已进行GPS 测量,则可将测量成果直接作为该基准站坐标。而在我国,这种成果大部分也是固定控制网中某一个GPS 点的单点定位结果通过无约束平差获得的。除非确定基准站准确的WGS-84坐标,否则均不可能获得流动站的WGS-84 坐标。
二、数值分析
GPS 精密单点定位技术一般获得的是平均观测历元ITRF 框架的三维空间坐标,可将其转换为WGS-84 坐标系的大地坐标,不同的ITRF 框架及历元所对应的坐标会有差异,本文对这种差异进行分析,重点分析大地经纬度及大地高的变化及其对模型高程异常计算的影响。


1) 选择IGS 站中的KUNM 站作为模拟计算点,该点在ITRF2005 框架, 2000. 0014 历元的坐标( B =39. 608 601 77,L = 115. 892 483 54,H = 87. 438 4) 为基准数据。在该坐标的经纬度方向模拟± 50 cm 的随机误差,大地高方向模拟± 5 cm 的随机误差,模拟误差大小是根据同一个点在不同框架及不同历元大地坐标变化情况确定的。
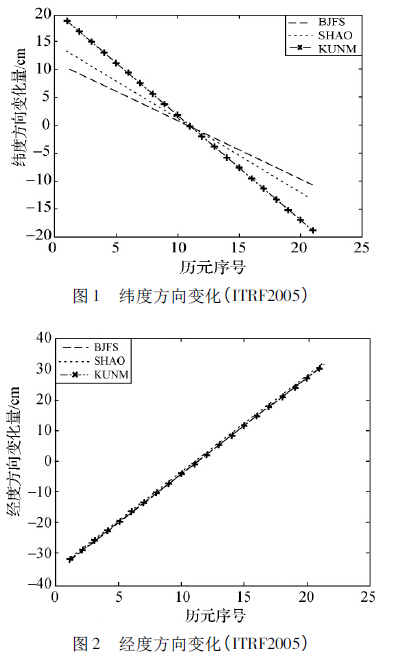
1.不同历元不同框架下大地坐标变化情况现选择BJFS、SHAO 和KUNM 3 个IGS 跟踪站的数据对IGS 站所对应的不同框架及历元的坐标变化情况进行分析,框架选择ITRF2005 和ITRF2000,每个框架的历元从1990. 0014 到2010. 0014,间隔为1 年,每个IGS 站均获得了21 组数据,数据来自SOPAC( scripps orbit and permanent array center) 网站。图1 ~图3 为ITRF2005 框架下IGS 站BJFS、SHAO 和KUNM 在大地纬度、大地经度及大地高方向的变化情况,其参考基准为2000. 0014 历元,即所有历元的变化结果是该历元坐标与参考历元坐标的差值。图4 ~图6 为同一历元, IGS 站BJFS、SHAO 和KUNM 在ITRF2005 框架和ITRF2000 框架大地坐标差。
图1 ~ 图3 结果显示,在ITRF2005 框架下,若以2 000. 001 4 历元为基准,3个IGS 跟踪站大地坐标3 个分量中,纬度变化范围为± 20 cm,经度变化范围为± 40 cm,而大地高变化范围仅为± 2. 5 cm。因此在同一参考框架下,不同历元对点的经纬度影响较大,而对大地高的影响较小。
图4 ~ 图6 结果显示,同一历元, ITRF2005 和ITRF2000 框架下,3个IGS 跟踪站大地坐标3 个分量中,纬度差异为- 1. 5 ~ 2. 5 cm,经度差异为- 1. 0 ~3. 0 cm,而大地高差异仅为- 0. 4 ~ 0. 8 cm。因此对同一历元、不同参考框架,点的大地坐标差异较小,大地高的差异不超过1 cm。
从以上结果可以看出,若以2000. 0014 历元为基准,无论在ITRF2005 框架还是在ITRF2000 框架下,同一个点10 年内的大地经纬度变化一般不会超过40 cm,而大地高的变化一般不会超过2.5 cm,这说明不同框架及历元,大地高的变化很小。
2.大地坐标变化对模型高程异常的影响分析
同一个点在不同历元时刻,点的大地坐标会发生不同情况的变化。针对这种情况,分析这种变化对模型高程异常计算结果的影响。
2) 利用2 160 阶的EGM2008 模型及模拟误差后的坐标计算点的模型高程异常,共模拟500 次。
3) 将500 次模拟误差后计算得到的模型高程异常和基准数据进行比较。
图7 为点大地坐标变化对模型高程异常的影响,结果显示,大地经纬度± 50 cm 的误差,大地高± 5 cm 的误差对模型高程异常计算的影响最大也不会超过± 0. 05 mm,因此其影响完全可以忽略。
图7 为点大地坐标变化对模型高程异常的影响,结果显示,大地经纬度± 50 cm 的误差,大地高± 5 cm 的误差对模型高程异常计算的影响最大也不会超过± 0. 05 mm,因此其影响完全可以忽略。

3.大地高变化与空间直角坐标变化的关系一般情况下,在给出点( 如IGS 站) 在某一框架及特定历元时刻坐标的同时,会给出站点在该框架的坐标变化速度,用于同一框架不同历元坐标归算,但速度是X、Y、Z 形式的。为了获得大地高变化速度,可采用如下方法进行转换,对大地坐标与空间直角坐标的关系式进行微分可得到

其中,M、N 分别为子午圈和卯酉圈曲率半径。
则可得到大地高与X、Y、Z 坐标变化的关系式
dH = cos Bcos L·dX + cos Bsin L·dY + sin B·dZ (2)
式中,dX、dY 和dZ 表示点的空间坐标变化速度或变化量。根据点的概略坐标及X、Y、Z 3 个方向的速度或变化量,利用式( 2) 即可获得大地高的变化速度或变化量。


四、结束语
三、算例与结果分析
现选择某一工程项目的GPS RTK 数据对本文方法进行试验,并分析精度。该项目GPS RTK 作业采用的仪器设备为Trimble 5700( 1 个基准站+ 1 流动站) ,具体作业方法为: ① 选择一适合GPS 观测的位置安置GPS 基准站; ② 对该点进行静态测量,并记录观测数据,数据采样率为15 s; ③ 对基准站进行设置,基准站的坐标采用现场单点定位方法获得,精度约为米级,并启动动态测量; ④ 进行GPSRTK 测量,坐标转换采用点校正的方法,同时对区域内的水准点进行联测,本次试验中GPS RTK 联测水准点的概略图如图8 所示,其中实方框表示基准站,十字丝表示流动站。
本次GPS RTK 作业半径小于10 km,基准站静态观测时间约为4 h,采用CSRS-PPP 软件解算基准站坐标,精密单点定位所获得结果的框架为ITRF2005,历元为平均观测时刻,大地坐标3 个方向的内符合精度均优于± 3 cm。利用GPS RTK 技术共观测了9 个已知水准点,利用解算的ITRF2005 框架下的基准站坐标以及GPS RTK 技术获得的基准站与流动站间的坐标差,推求流动站ITRF2005 框架下的坐标,并将其转换为WGS-84 大地坐标,作为高程计算的基础数据。
图9 为利用本文方法获得的水准点的WGS-84坐标以及2 160 阶的EGM2008 模型获得的正常高与真实正常高的差值图。图9 结果显示,在该测区,利用点的WGS-84 ( 对应ITRF2005 框架) 坐标及EGM2008 模型直接进行高程转换的精度约为± 17 cm,差值绝对值最大不超过20 cm。造成差值的原因主要有3 点: 地球重力场模型的精度和分辨率、GPS 单点定位技术获得的点大地高的精度、地球重力场模型所表示的全球似大地水准面和我国国家高程基准的偏差。若重力场模型采用EGM2008,则可能第三种因素的影响最大。为消除这种偏差,现利用T1 号点的真实正常高和计算正常高计算偏差,然后对其他点计算正常高进行校正,校正偏差后其精度提高到± 2. 4 cm。因此,若在实际测量中作业区域内没有水准点,则可对靠近测区最近的水准点进行静态测量,利用GPS 精密单点定位方法解算该点的ITRF 框架坐标,并计算这种偏差。由于测量成果基准一致,则可将该偏差用于GPS RTK 测量区域的高程校正。
四、结束语
本文提出了一种新的GPS RTK 高程测量方法,该方法通过基准站静态测量以及动态测量相结合的方法,运用GPS 精密单点定位方法可以获得所有测量点的ITRF 框架坐标( 可转换为WGS-84 坐标) ,所获得的结果基准明确,可避免常规GPS RTK 测量基准站坐标的不确定性偏差,而且静态与动态测量互不影响。对于水准点稀少甚至无水准点测区的快速测图工作具有很好的应用价值,基准明确的坐标也有利于采用后处理方式进行坐标转换和高程转换,当需要点的较低精度的2000 国家大地坐标和正常高时,无需进行坐标转换和高程拟合即可获得相应的结果。
参考文献:
[1] 喻华. GPS RTK 技术在地籍测量中的应用[J]. 测绘通报, 2007( 4) : 51-52.
[2] 王斌,金立新,魏庆朝. GPS 技术在铁路定测放线中的应用[J]. 测绘通报, 2006( 4) : 45-47.
[3] 张兴福,刘成,王兵海,等. 无水准数据的GPS 高程转换方法及精度分析[J]. 大地测量与地球动力学,2010, 30( 1) :114-118.
声明:中国勘测联合网登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考。