2 海底地形测量的发展趋势
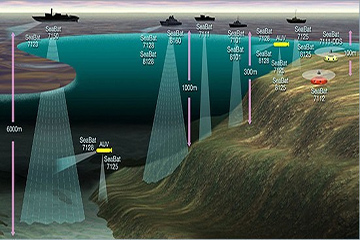
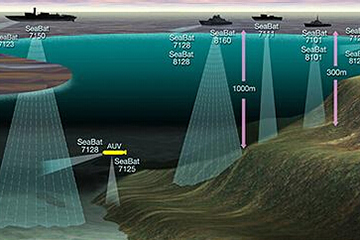
未来水下地形测量仍呈现立体测量态势,且在各个层次会进一步加深,未来的测深将向自动化、智能化、集群化、高精度、高密度、高效率方向发展。具体表现如下:
2.1 回声测深技术
2.1.1 多波束测深系统
超宽覆盖、高精度、高分辨率是多波束测深系统未来的发展方向。
覆盖宽度和测量精度是影响多波束测深的两个重要指标。换能器扇面开角影响覆盖宽度,为提高覆盖宽度,国内外学者和厂家正致力于换能器基阵形式研发,采用U型、V型阵列分布替代传统的Mill’s交叉阵,尤其是V型阵,利用两套均能独立收发基阵构成V型安装,使每套基阵水平夹角合理设置后发射波束主轴偏离基阵正下方,增强边缘波束方向的能量,利于接收边缘波束海底回波信号。为精确检测边缘波束的回波和实现宽覆盖、全Ping扇面所有波束精确测量,一些学者利用分裂子阵相位差检测法、多子阵检测法等实现波束检测,提高了检测精度和可靠性[32-33]。
分辨率是衡量多波束测深水平的另一个重要指标,决定了水下小目标及复杂地形的精细探测能力。除采用双基阵提高数据分辨率外,近年来,相干研究从机理上解决了多波束测深分辨率受波束数限制的问题。因具有算法简单、波束数显著增加、不增加硬件成本等优点,相干声呐技术受到愈来愈多的科研单位及生产厂商重视。
2.1.2 测深数据处理
声速影响改正、复杂海底地形下测深数据的滤波以及海床地形表达问题一直都是测深数据处理研究的热点。声速剖面实时获取和高精度、快速声线跟踪算法,对于解决声速的代表性误差以及由此产生的边缘波束测深数据异常问题、深海海量多波束Ping测深数据的快速处理问题等具有重要的作用。随着深海调查活动的深入,以上两个问题将会成为影响测深精度的关键问题。目前的测深数据滤波方法多基于地形/测深数据变化的一致性原则设计算法来实现滤波,该前提假设在复杂海床,如碎石区或工程抛石区将会遇到挑战,只有结合地形特征、多波束测深机理开展测深数据滤波,才能更好地剔除粗差和确保测深数据质量。此外,基于测深数据,如何准确地构建海床数字模型,满足航行、地形调查等不同需求是当前研究一个难点问题,也是未来测深数据处理发展的一个方向。
2.2 无人船海底地形测量技术
船基测量是目前获取海底地形精度较高的一种作业模式。船基测量需要根据测量范围、设计测线开展长程走航测量,尤其对于单波束系统,作业枯燥、烦琐、费时费力问题突出。无人船测量技术解决了浅水、低海况时海底地形的自动获取问题,提高了作业效率,显著降低了作业成本。但现有无人船海底地形测量系统在抗风浪、自治作业、全方位参数获取、海量测量数据实时传输、复杂海况下测量数据的高精度处理等方面研究仍需要深入,系统性能尚需进一步完善。
2.3 机载激光雷达测深技术
ALB对于解决近岸浅水、潮间带等地形测量相较其他测量方法更具优势,但近岸海水浑浊,导致激光穿透性能下降,测深能力不足、测深精度降低。因而未来的ALB系统在硬件方面将朝着性能改进和单绿激光方向发展。前者将进一步提高测深性能和精度,后者将在精度要求不高的情况下提高穿透力和降低设备成本,使设备小型轻量化,增强测量灵活性。浑浊度是影响穿透力和测深精度的主要因素,进一步研究海洋水文要素与激光测深精度的量化关系模型,对于修正ALB测深结果,提高测深精度将非常有益,也是未来ALB一个重要研究方向。
2.4 水深反演技术
基于声呐图像,恢复海底三维地形是实现海底高分辨率地形获取的一种有效途径。目前尽管取得了一些研究性结论,但距成熟应用尚有较大差距。基于声呐图像的海底地形恢复需解决的问题主要包括:顾及镜反射与漫反射的综合海底反射模型建立、基于声呐图像的海底非监督底质分类及底质因素对回波强度影响的消除,以及成像机理造成的阴影带来的反射模型解发散问题。此外,为实现无须外源测深数据辅助的相对地形向绝对地形转变,在侧扫声呐系统上需增加单波束测深仪,辅助海底线检测,提高图像精度的同时,也为绝对海底地形的恢复提供起算基准。
2.5 深拖综合测量技术
随着深海调查活动深入和对重点水域海底地形详勘需求的日益增加,深拖测深成像一体化系统将会日益受到关注。借助深拖中的测深系统可以获得精细的海底地形,借助侧扫声呐图像可以获得高分辨海底地貌图像,由于两套系统的基准同为拖体,因此解决了常规测深和成像出现的位置不匹配问题,直接将形成的地貌图像叠加到地形上,实现高精度地形和地貌信息的一体化获取。
参考文献:
[1]赵建虎. 现代海洋测绘[M]. 武汉: 武汉大学出版社, 2008.
[2]赵建虎, 刘经南. 多波束测深及图像数据处理[M]. 武汉: 武汉大学出版社, 2008.
[3]滕惠忠, 辛宪会, 李军, 等. 卫星遥感水深反演技术的发展与应用[C]//第二届高分辨率对地观测学术年会论文集. 北京: 中国宇航学会, 中科院电子学研究所, 2013.
[4]翟国君, 吴太旗, 欧阳永忠, 等. 机载激光测深技术研究进展[J]. 海洋测绘, 2012, 32(2): 67–71.
[5]张全德, 范京生. 我国卫星导航定位技术应用及发展[J]. 导航定位学报, 2016, 4(3): 82–88.
[6]何广源, 吴迪军, 李剑坤. GPS无验潮多波束水下地形测量技术的分析与应用[J]. 地理空间信息, 2013, 11(2): 155–156, 159.
[7]黄国良, 徐恒, 熊波, 等. 内河无人航道测量船系统设计[J]. 水运工程, 2016(1): 162–168.
[8]金久才, 张杰, 马毅, 等. 一种无人船水深测量系统及试验[J]. 海洋测绘, 2013, 33(2): 53–56.
[9]BEAUDOIN J, SMYTH S, FURLONG A. Streamlining Sound Speed Profile Pre-Processing:Case Studies and Field Trials[C]//Proceedings of US Hydrographic Conference. Tampa, FL:The Hydrographic Society of America, 2011:25-28. http://archimer.ifremer.fr/doc/00115/22615/
[10]DAVID D H, PEUCKER T K. Algorithms for the Reduction of the Number of Points Required to Represent a Digitized Line or Its Caricature[J]. Cartographica:the International Journal for Geographic Information and Geovisualization, 2011, 10(2): 112–122.
[11]魏碧辉, 刘翀, 周青, 等. 基于最小二乘支持向量机的声速空间变化模型构建[J]. 海洋测绘, 2013, 33(4): 12–15.
[12]王海栋, 柴洪洲, 翟天增, 等. 多波束测深异常的两种趋势面检测算法比较[J]. 海洋通报, 2010, 29(2): 182–186.
[13]张志伟, 暴景阳, 肖付民. 抗差估计的多波束测深数据内插方法[J]. 测绘科学, 2016, 41(10): 14–18.
[14]黄贤源, 隋立芬, 翟国君, 等. 利用Bayes估计进行多波束测深异常数据探测[J]. 武汉大学学报(信息科学版), 2010, 35(2): 168–171.
[15]王德刚, 叶银灿. CUBE算法及其在多波束数据处理中的应用[J]. 海洋学研究, 2008, 26(2): 82–88.
[16]赵建虎, 张红梅, 严俊, 等. 削弱残余误差对多波束测深综合影响的方法研究[J]. 武汉大学学报(信息科学版), 2013, 38(26): 1184–1187.
[17]MANDLBURGER G, PFENNIGBAUER M, PFEIFER N. Analyzing Near Water Surface Penetration in Laser Bathymetry-A Case Study at the River Pielach[C]//Proceedings of ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences. Antalya, Turkey:ISPRS, 2013:175-180. http://adsabs.harvard.edu/abs/2013ISPAn.II5b.175M
[18]ZHAO Jianhu, ZHAO Xinglei, ZHANG Hongmei, et al. Shallow Water Measurements Using a Single Green Laser Corrected by Building a Near Water Surface Penetration Model[J]. Remote Sensing, 2017, 9(5): 426. DOI:10.3390/rs9050426
[19]秦海明, 王成, 习晓环, 等. 机载激光雷达测深技术与应用研究进展[J]. 遥感技术与应用, 2016, 31(4): 617–624.
[20]元建胜. 海岸带地形一体化测图生产技术研究[J]. 海洋测绘, 2011, 31(4): 75–78.
[21]马小川, 栾振东, 张鑫, 等. 基于ROV的近海底地形测量及其在马努斯盆地热液区的应用[J]. 海洋学报, 2017, 39(3): 76–84.
[22]曹金亮, 刘晓东, 张方生, 等. DTA-6000声学深拖系统在富钴结壳探测中的应用[J]. 海洋地质与第四纪地质, 2016, 36(4): 173–181.
[23]黄文骞, 苏奋振, 杨晓梅, 等. 多光谱遥感水深反演及其水下碍航物探测技术[J]. 海洋测绘, 2015, 35(3): 16–19.
[24]胡敏章, 李建成, 金涛勇, 等. 联合多源数据确定中国海及周边海底地形模型[J]. 武汉大学学报(信息科学版), 2015, 40(9): 1266–1273.
[25]李倩倩, 鲍李峰. 高精度测高重力场反演南海海底地形[J]. 海洋测绘, 2016, 36(2): 1–5.
[26]COIRAS E, PETILLOT Y, LANE D M. Multiresolution 3D Reconstruction from Side-scan Sonar Images[J]. IEEE Transactions on Image Processing, 2007, 16(2): 382–390.DOI:10.1109/TIP.2006.888337
[27]王爱学, 赵建虎, 尚晓东, 等. 单波束水深约束的侧扫声呐图像三维微地形反演[J]. 哈尔滨工程大学学报, 2017, 38(5): 739–745.
[28]赵建虎, 尚晓东, 张红梅. 水深数据约束下的声呐图像海底地形恢复方法[J]. 中国矿业大学学报, 2017, 46(2): 443–448.
[29]李大炜, 李建成, 金涛勇, 等. 利用验潮站资料评估全球海潮模型的精度[J]. 大地测量与地球动力学, 2012, 32(4): 106–110.
[30]赵建虎, 董江, 柯灝, 等. 远距离高精度GPS潮汐观测及垂直基准转换研究[J]. 武汉大学学报(信息科学版), 2015, 40(6): 761–766.
[31]柯灏. 海洋无缝垂直基准构建理论和方法研究[D]. 武汉: 武汉大学, 2012.
[32]陆秀平, 黄谟涛, 翟国君, 等. 多波束测深数据处理关键技术研究进展与展望[J]. 海洋测绘, 2016, 36(4): 1–6, 11.
[33]李海森, 周天, 徐超. 多波束测深声呐技术研究新进展[J]. 声学技术, 2013, 32(2): 73–80.
声明:中国勘测联合网登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考。