崔有祯,李亚静
( 北京工业职业技术学院,北京100042)
在建筑物基坑边坡稳定性监测工作中,需要采用精密水准测量( 二等) 监测边坡的垂直位移,并采用传统测量方法测定监测点的侧向水平位移。而在实际工作中,由于高差比较大和场地情况等原因,采用精密水准测量进行垂直位移监测时,往往要进行多站测量,导致测量误差累积较大。同时,采用传统方法进行水平位移监测时,对监测点、基准点的设置也有诸多要求。本文探讨了应用徕卡TM30 测量机器人,采用自由设站方法进行三维测量,并分析了利用该方法进行水平位移监测和垂直位移监测的可行性和可靠性。
在北京某艺术中心工程建筑物基坑工地,布置了如图1 所示的三维后方交会控制网,其中A、B、C3 个控制点为已知的高精度控制点,均布设在施工场地附近的楼房( 预测变形区域之外) 上,同时3 个控制点均采用徕卡TM30 测量机器人以4 个测回自动跟踪观测,并按严密平差法计算出其平面坐标和高程,结果取位至0. 1 mm。
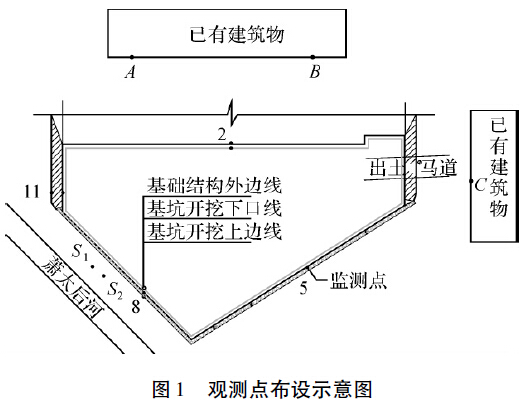
1 ~ 12 点为拟观测的边坡稳定性监测点。观测时首先在S1位置自由设站安置徕卡TM30 测量机器人,以3 个测回自动观测3 个已知点和各个监测点的距离、水平方向和竖直角; 然后将仪器移动到S2位置重新安置自动跟踪全站仪,并重复S1测站的观测。S1、S2两站外业观测,应在2 小时之内完成;要求在微风、阳光照射比较弱的条件下观测,此为一次观测,为了保证成果的可靠性,每周期观测应独立进行两次。
二、精密三维测量精度预计
为了确定观测方案的技术可行性,在进行外业观测之前,对该方案进行了精度预计。根据使用的仪器设备情况和观测方案,进行精度预计时,取水平角观测中误差mγ = 0. 5″,水平距离观测中误差ms = 0. 5 mm,竖直角观测中误差mδ = 0. 7″。然后根据定权公式确定各观测值的权。

1) 根据间接平差原理,列出图1 中各距离观测值误差方程、水平角观测值误差方程、竖直角观测值误差方程( 以测站点、监测点的平面坐标和高程作为未知数) 。
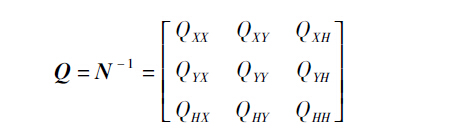
2) 组成法方程系数矩阵
2) 组成法方程系数矩阵
3) 求N 的逆矩阵,得出待定点三维坐标协因数阵
4) 监测点平面点位中误差

5) 监测点水平重要方向上的误差

6) 监测点高程中误差

7) 误差预计成果表见表1。
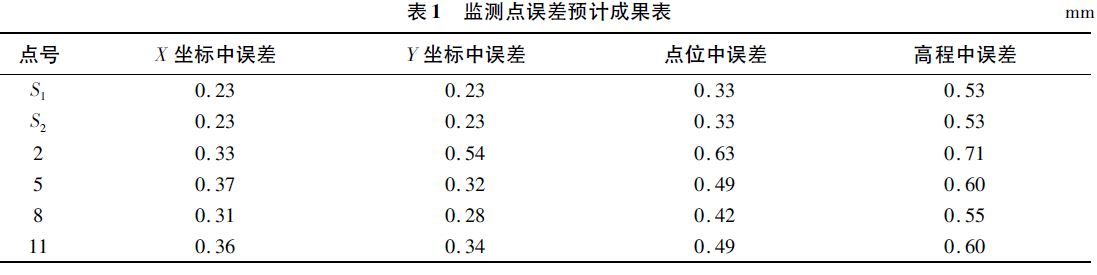
由表1 中的预计结果可以看出,若进行两次独立观测取平均值作为最终观测结果,则对于水平位移监测的误差而言,均小于0. 5 mm,能够满足边坡变形水平位移监测的精度要求; 监测点垂直位移中误差不超过0. 71 mm,可以满足一般变形监测中垂直位移监测的精度要求。
由表1 中的预计结果可以看出,若进行两次独立观测取平均值作为最终观测结果,则对于水平位移监测的误差而言,均小于0. 5 mm,能够满足边坡变形水平位移监测的精度要求; 监测点垂直位移中误差不超过0. 71 mm,可以满足一般变形监测中垂直位移监测的精度要求。
三、实测与资料分析
观测时采用徕卡TM30 测量机器人自动跟踪观测3 测回,同时观测方向、距离和垂直角。观测标志均采用反光贴片观测标志,并统一编号; 进行了4 周期试验观测,每周期观测独立进行两次观测。通过固定测站位置的措施,可以使大气折光和地球曲率的影响在各次观测结果中的影响相同,因此进行内业数据处理时可以不考虑上述因素的影响。
为了保证观测结果的可靠性,观测时尽量在阴天或日出前通视良好、无风或微风的条件下进行。建立固定观测标志,固定使用一台仪器及三维后方交会自由设站方法等措施,尽可能减少仪器误差及对中误差的影响。每次观测两个设站点之间的距离一般控制在2 m 以内,否则两站观测的结果受大气折光[10]和地球曲率的影响差异就比较大。同时,测站与观测点( 包括已知点和监测点) 之间的距离不宜超过200 m。
内业计算采用三维观测间接平差计算数学模型,对观测数据进行整体严密平差计算。试验观测数据平差计算结果统计( 以2#、5#、8#、11# 4 个监测点为例) 见表2 ~ 表5。
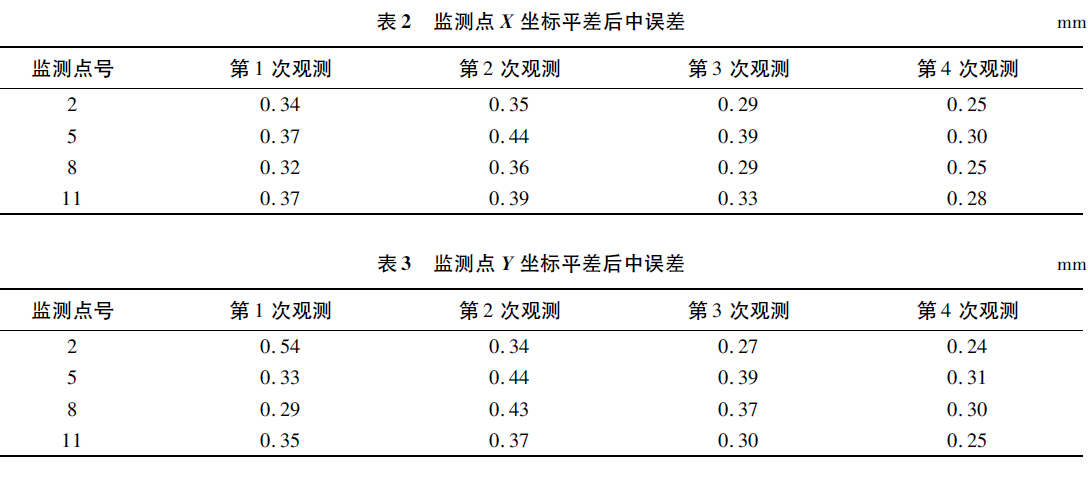
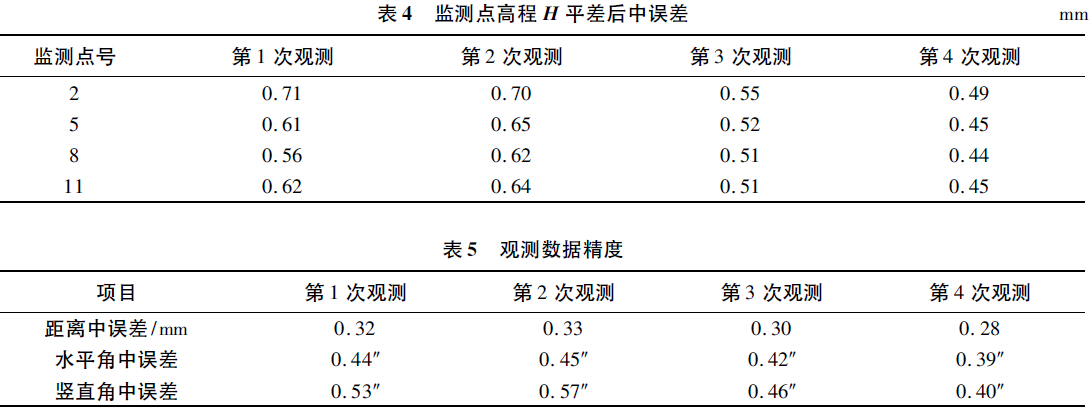
由表2 ~ 表5 可以看出,X 坐标平差后中误差最大为0. 39 mm,Y 坐标平差后中误差最大为0. 54 mm,能够达到基坑边坡水平位移监测的精度要求; 监测点高程平差值中误差最大为0.71 mm,能够达到基坑边坡垂直位移监测的精度要求。
由表2 ~ 表5 可以看出,X 坐标平差后中误差最大为0. 39 mm,Y 坐标平差后中误差最大为0. 54 mm,能够达到基坑边坡水平位移监测的精度要求; 监测点高程平差值中误差最大为0.71 mm,能够达到基坑边坡垂直位移监测的精度要求。
四、结束语
本文提出了一种全新的建筑物基坑边坡监测方法,该方法通过测量机器人任意设站及自动跟踪观测相结合的方法,运用徕卡TM30 测量机器人进行精密三维测量,利用严密平差数学模型计算建筑物基坑边坡监测点的三维坐标。所获得的监测结果能够满足建筑物基坑边坡监测的精度要求,可以代替传统的二等水准测量和水平位移监测,实现了监测过程的自动化,节省了观测时间和人力,并且监测成果具有良好的可靠性。
参考文献:
[1] 李青岳,陈永奇. 工程测量学[M]. 北京: 测绘出版社,2008: 276-286.
[2] 李典凯,王东理,修雪英,等. 距离交会法在吹填围堰位移观测中的应用[J]. 测绘通报, 2003( 9) : 50-51.
[3] 崔有祯. 开采沉陷与建筑物变形观测[M]. 北京: 机械工业出版社, 2009: 155-157.
[4] 杨俊志. 常用大地测量仪器名称及相关术语的标准化[J]. 测绘通报, 2004( 2) : 65-66.
[5] 王解先,高小兵,侯东亚,等. 高速铁路CPⅢ点整体三维严密平差[J]. 测绘通报, 2011( 1) : 46-48.
[6] 国家测绘局人事司,国家测绘局职业技能鉴定中心.工程测量[M]. 北京: 测绘出版社, 2009: 7-8.
[7] 游祖吉. 测量平差教程[M]. 北京: 测绘出版社, 1991:68-73.
[8] 崔有祯,韩光舜,李文杰. 边角后方交会最优图形与精度分析[J]. 北京测绘, 2011( 3) : 89-90.
[9] 李天和. 建筑物基础水平位移监测方法探讨[J]. 测绘通报, 2003( 10) : 63-64.
[10] 田林亚,夏开旺,李鹏. 高程数字模型三角高程测量在堤防施工沉降监测中的应用[J]. 测绘通报,2004( 10) :52-54.
[10] 田林亚,夏开旺,李鹏. 高程数字模型三角高程测量在堤防施工沉降监测中的应用[J]. 测绘通报,2004( 10) :52-54.
声明:中国勘测联合网登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考。