伴随着地理信息在人们生产生活中的不断渗透,人们对现势性强、精度可靠地理信息的需求越来越迫切,尤其在应急测绘、抢险救灾等对时间要求比较紧迫的项目中。目前地理信息获取的主要方式为数字摄影测量、遥感、GPS测量、电子平板采集等,这些常规的地理信息获取方式往往周期长、劳动强度大、作业效率低,不能满足人们对地理信息的快速需求。如何快速获取高精度的地理信息,成为摆在测绘人员面前的一道难题。随着对地观测技术的快速发展,利用新型机载激光雷达(LiDAR)系统快速获取高精度地理信息已成为可能。
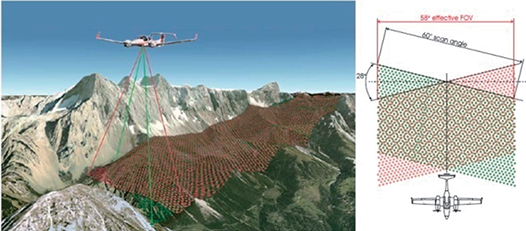
机载激光雷达(LiDAR)系统是一种新型的综合应用激光测距仪、IMU、GPS的快速测量系统,可以直接联测地面物体各个点的三维坐标。系统组成包括:①激光测距仪用于测量传感器到地面点的距离;②高精度惯性测量系统(IMU)用于测量扫描装置主光轴的空间姿态参数;③基于差分技术的全球定位系统(DGPS)用于确定扫描投影中心的空间位置;④高分辨率数码相机用于获取对应地面的彩色数码影像。LiDAR测量的绝对精度可在0.1m~0.5m之间,它的优势在于对大范围、作业困难地区、植被下层的地面或非地面数据的快速获取,而这正是用其他方法所不能得到的或是在高昂成本下才能获得的。
因此,机载LiDAR技术,作为一种方便、快速、高效的空间数据获取方法,成为用于快速获取三维地形信息的重要技术手段。
1 数据处理平台
基于机载LIDAR生产地形数据,涉及到机载LiDAR点云滤波与分类、DEM和DSM制作、等高线提取与编辑、高程注记点提取等的过程。在选择数据处理平台时,既要考虑软件的成熟性与易操作性,又要考虑作业员对软件的熟练应用程度。
数据处理平台应包括以下功能:(1)应该能够实现点云的导入导出、查看浏览、坐标转换、自动与手动分类,DEM和DSM制作、等高线提取,创建彩色渲染图,提供丰富的分类工具,便于点云的精分类,能够适于对数百万的机载激光雷达点云数据进行分类处理。(2)用户能够通过协调一致地调用应用和界面,实现任何从简单到复杂的GIS任务,包括制图、地理分析、数据编辑、数据管理、可视化和空间处理等操作。(3)能够实现多种数据格式的相互转换,能够可视化地定义从原数据到目标数据的对应关系(属性和图形),也能实现不同格式数据源的合并操作,并且,数据转换质量要好,满足地形数据生产需求。(4)能够实现地形数据的简化、平滑化、修剪、删除、优化等编辑处理,使数据能够满足出图要求,图面美观,要素分布合理。
综合机载激光雷达的数据特点以及数据生产需要,选择TerraSolid、ArcGIS Desktop、FME、CASS等软件作为本次数据处理平台。TerraSolid用于点云滤波与分类,ArcGIS Desktop用于等高线生成与平滑,FME用于数据格式转换,CASS用于等高线的编辑。
2 数据处理关键技术研究
基于机载LiDAR技术获取地形信息的过程包括坐标转换、点云分类、DSM制作、点云抽稀、DEM制作、等高线和高程注记点生产等,如图2-1所示。
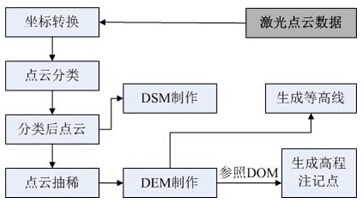
图2-1基于机载LiDAR的地形信息获取流程
(1)坐标转换
由于直接获取的点云坐标采用的是地心坐标WGS84坐标系,高程系统采用的是大地高,而实际使用时,平面坐标通常采用1980西安坐标系、1954年北京坐标系或者2000国家大地坐标系,高程一般为1985国家高程基准,因此在基于获取点云生成地面三维信息时,需要对点云进行平面坐标和高程系统转换。高程值的转换一般通过大地水准面模型来实现,黄河中下游已经建立了区域大地水准面精化模型
平面坐标转换一般采用2.1式的七参数模型,其中,K 为比例系数,Dx、Dy、Dz分别为X、Y、Z的平移常数,ωx、ωy、ωz分别为X、Y、Z方向的旋转参数,有3个已知点的两套坐标就可应用最小二乘法求出这七个坐标转换参数的解。求得转换参数后,再利用上述模型进行坐标转换。

对于高程精度要求比较高的项目,通过七参数模型获取的Z值并不能满足项目需求,精确的高程值还需通过测区范围的大地水准精化模型来实现。
(2)点云分类
在TerraSolid中进行点云分类,包括粗分类和精分类两个步骤。如图2-2,粗分类主要是去除飞点、低点等噪声点,根据Terrasolid提供的宏命令实现地面点、植被点、建筑物点等的粗略分类,以程序实现为主;精分类主要是借助于正射影像、实地情况等资料实现地物点和地貌点的精确分类,以人工判读为主。
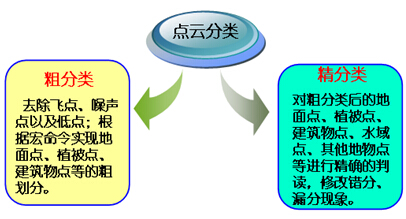
图2-2 Terrasolid点云分类图
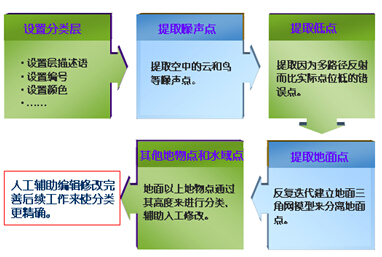
2-3 Terrasolid下点云分类流程
Terrasolid下点云分类流程如图2-3所示,包括设置分类层、提取噪声点、提取低点、提取地面点、提取其他地物点和水域点、参照DOM进行人工辅助修改等环节。在Terrasolid中,通过对点云进行去噪、粗分类、精分类等相关操作后,即可实现点云的滤波与分类,将不同地物的点云、地面点云分至相应的点云图层中,为DEM和DSM的制作提供可靠的数据基础。
(3)DSM制作
数字表面模型DSM (Digital Surface Model)是指包含了地表建筑物、桥梁和树木等高度的地面高程模型;而DEM只包含了地形的高程信息,并未包含其他地表信息。DSM 是在DEM 的基础上,进一步涵盖了除地面以外的其他地表信息的高程模型。在一些对建筑物高度有需求的领域,DSM得到了很大程度的重视。
因为DSM是包含了地物高度的DEM,所以在生成DSM时,不需要进行地面点和地物点的分类,只需将扫描点云中的噪声点和低点去除,然后利用剩余的点云生成地面模型即可。其制作方法与DEM制作方法类似,这里不再重述。
(4)点云抽稀
由于扫描地面获取的激光点云一般很多,基于这些大量点构建的DEM和DSM虽然表示细节较丰富,但是存在数据量大、运行速度慢、生成的模型因表示细节太详细而显得不光滑和不真实等缺点,因此,在根据分类后的地面点生成DEM时,通常需要对点云进行抽稀处理,抽取构建模型所必需的模型关键点(Model Keypoints),以便用更少的点来构建地表模型。
本研究采用模型关键点法从地面点中抽取少而精的点用于DEM制作,模型关键点法的主要原理为:首先用给定大小(设为D)的正方形网格将点云所在区域格网化,然后分别选取每个正方形网格中的最高点和最低点作为初始关键点用来构成初始三角网模型,计算模型上、下激光点分别到初始模型的距离(即高差),通过两个设置参数(模型上点最大高差Habove和模型下点最大高差Hblow)来寻找上下远离现有模型的点,若模型上(下)激光点到三角网模型的距离小于Habove(Hblow),则将该点加入到关键点的类别中,重新构建新的三角网模型,如此反复,直至找到所有满足条件的模型关键点为止。其中的格网边长D表示每D米距离的范围内必须有一个点,其大小决定了平坦地区模型点的密度大小,D越大,则平坦地区选的点越少,表示的地形越平滑。
(5)DEM制作
DEM主要是根据分类获得的三维地面点云(Ground)来制作生成的。本研究中有两种方法来实现,分别在ArcGIS和TerraScan中生成。
方法一:在ArcGIS中生成。有两种途径,一是导出分类后抽稀的地面点云,将这些点转换成ArcGIS的点要素类,然后根据这些点生成不规则三角网(TIN),再将TIN转换成规则格网Grid,生成DEM;二是根据导出的分类后抽稀的地面点云,内插生成规则格网Grid,生成DEM,内插方法有多种,包括反距离加权法、自然邻域插值法、克里金插值法、样条函数插值法等。此方法适合于点云较少的情况,点云太多的话,效率会很低;但是内插方法较多,可供用户选择。
方法二:在TerraScan中生成。直接在TerraScan中根据抽稀后的地面点云生成表面模型,然后以Arcinfo格式导出。此方法适合面积较大区域DEM的制作,效率较高;但是该方法的内插方法是默认的,用户不能自行选择。
(6)等高线生成
生成等高线的方法有两种,分别在ArcGIS和TerraModeler中生成等高线,但是对等高线的综合、编辑、平滑等处理的步骤和软件均是相同的。如图2-4,可以分别在ArcGIS和TerraModeler中根据DEM生成等高线,但是在TerraModeler中生成的等高线是MicroStation的dgn格式,需在FME中将其转换成shape格式数据,才能确保后续的在ArcGIS中对其进行小短线和小圈去除、平滑化等处理,ArcGIS中处理后得到的等高线还需要转换成dwg格式,在CASS中按着图式要求对其进行相应的删除、综合等编辑,最终生成dwg格式的等高线成果以供出图使用。
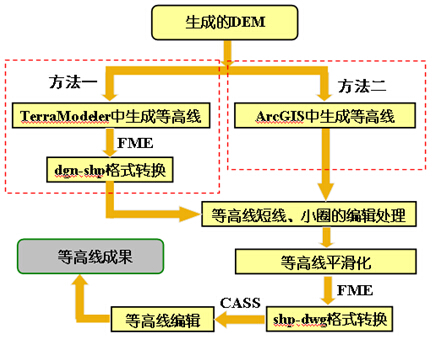
图2-4等高线生成流程
(7)高程注记点提取
生成高程注记点有如下两种方法:
方法一:结合点云测区老资料高程注记点的平面位置信息,以分类后的点云数据为基础,重新赋予高程值,更新注记点。
方法二:在正射影像上选出高程注记点的平面位置,以分类后的点云数据为基础,来获取选点高程值,获得注记点位及点值。根据影像选取注记点时,须遵照以下规则:在路交叉、河路交叉、水边、独立地物、桥上、山顶、山脊、鞍部、山洼、单线河、冲沟等处必须选取高程注记点,高程注记点密度为图上每100cm2(也即图上边长为10cm的正方形网格内)10-15个。
3 机载LiDAR技术在生产中的应用
研究区域为黄河局部河段滩区部分范围,要求基于机载LiDAR扫描点云数据快速生成满足技术要求的DEM、DSM、等高线、高程注记点等要素,为测区1:1万地形图出图提供基础地貌数据。数据源为ALS60激光雷达扫描点云数据,高程精度≤0.14m,扫描点间隔≤2m,扫描面积为1500km2。如图3-1、3-2、3-3、3-4是部分成果截图:

图3-1 DSM成果

图3-2 DEM成果

图3-3 等高线成果
图3-4 高程注记点成果
为了验证点云精度,本研究以中误差作为精度指标对机载激光雷达数据的精度进行分析评价。中误差(RMSE, root mean square error)亦称“标准误差”或“均方根差”,是观测值误差平方平均值的根,它包含系统误差和偶然误差的影响,按式(3.1)进行计算。
其中, 为机载LiDAR数据与真实数据的差值, 为点数。
在激光雷达扫描区域范围内均匀选择26个高程点作为检查点。检查点选点规则为:在相对较平坦地方选取,以像控点为中心,半径5米范围内应地势平坦,空中无大范围的遮挡。检查点的真实高程(H)通过外业实测获得。
根据检查点平面位置由机载LiDAR点云数据内插获得的高程值为LiDAR_H,以中误差作为点云数据的精度评定指标,按着式(3.1)计算得到点云高程的中误差为0.11m,小于0.14m,精度符合设计要求,所以生成的DEM、等高线及高程注记点的精度可靠。
4 结语
机载LiDAR技术能实现空间三维坐标和影像数据的同步、快速、高精度获取,在采集地表数据方面具有传统航空摄影测量所无法比拟的优势,是对传统摄影测量技术在高程数据获取及自动化快速处理方面的重要技术补充,它能为测绘工程、数字地图和GIS应用快速提供精确的空间坐标信息和三维模型信息,已广泛应用于测绘、水利、林业、军事等诸多领域。研究表明,基于机载LiDAR生产地形信息,获取数据速度快、精度高、外业工作量少(减少80%左右),可节省大量的人力、物力和财力,提高工作效率,确保了地理信息的现势性,具有较明显的经济效益和社会效益。
作者简介:胡洁(1981-),女,硕士,高级工程师,从事测绘与3S技术研究
声明:中国勘测联合网登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考。