一、前言
随着现代科学技术的不断发展及空间数据应用领域的不断扩大,海洋价值逐渐被人们所认识,人类更加关注海洋,希望更全面、更准确地了解海洋,对获取准确可靠空间数据的要求也越来越高,因而人们对海洋观测技术的要求也越来越高,人们渴望拥有能够满足大面积、高速度、高精度和低成本的现代海洋测深设备。机载激光测深具有的可快速到达测量船无法进入的岩礁地带、珊瑚礁等大范围浅海海域实施测量的特点,在技术上不断改进日益成熟的机载激光测深设备在不断满足人们对现代海洋测深的需求的同时,也更加受到业内人士的重视。

早在20世纪60年代初,就有人提出了机载激光测深的设想,最初机载激光测深技术带有浓厚的军事色彩,到了20世纪70年代中叶,美国的NASA、美海军对机载激光测深技术加以开发,加拿大国家遥感中心(CCRS)与OPTECH公司也将其作为测深设备共同着手进行开发研制;瑞典的防卫调查局以OPTECH公司的技术为基础,进行了实质性的测量。与此同时,澳大利亚海军武器调查局有报告说已开发了WRELADS-1,并进入了试验使用阶段。而到了20世纪70年代末期,随着美海军、NASA、NOAA共同开发AOL(Airborne Oceanographic LidarLaser Radar),才作为海洋测深设备加以使用。从20世纪60~70年代的第一代机载激光海洋测深系统问世以来,至今已历经数十载,它没有被淹没在漫长的时间河流之中,反而对它的开发与改进已经成为世界性的工作。笔者认为这一现象值得我们研究与思考。

二、对机载激光测深新设备的探究
⒈ 新设备CZMIL与SHOALS工作原理的差异
自1968年第一个机载激光海洋测量系统问世以来,世界上已有美国、加拿大、瑞典等近10个国家先后开展了机载激光海洋测深系统的研究开发、试验和改进工作,现已进入实用阶段。目前发展比较成熟且已经商业化的系统主要有美国的EAARL系统、瑞典的Hawk Eyc系统和加拿大的SHOALS系统及CZMILXT。
CZMIL是一种全新的空中海岸测量系统,可对浅海海底的地形、底栖生物和水质表征实施测量,同时获取高分辨率三维数据和图像。
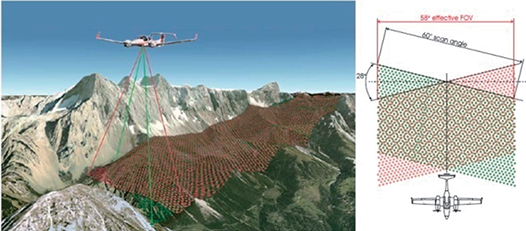
CZMIL是由加拿大Optech公司和南密西西比大学共同开发的机载激光测深仪。其设计工作高度为400m,探测器(包含光电倍增管PMT)、APD及PIN光电二极管。其中PIN光电二极管用于探测激光输出信号,作为后续计时起始信号;APD用于大气环境监测;PMT用于探测目标回波信号。CZMIL系统工作原理示意图见图1。

它可获得自海底到陆地的无缝数据,CZMIL在浅层浑浊的水域优势明显,它的测深雷达集成了高光谱成像系统和数码相机。与以往的SHOALS测深仪相比其功能更加强大。CZMIL由设有光学系统、激光发射装置、接收装置的传感器,装有激光发射、激光电源等的激光平台,嵌有GPS及惯导设备等服务类设备的控制台,嵌入操作员PC、存储器及波形处理设备等的操作台,以及冷却水供给的温度控制台等5部分组成,这些设备是依靠光缆等各种电缆和导管连接的。
SHOALS系统由近红外线及绿色激光、激光振荡器、光学接收机及数据处理装置等四部分构成,根据在水面反射的近红外线激光和到达海底又从海底反射的绿色激光的返回时间差获得水深,为了切实获得海面的反射光,通过绿色激光进行喇曼散射光进行接收。飞机定位采用的是D-GPS和K-GPS。其特点是可在短时间内测得大范围的相当于透明底2~3倍水深的海域,其工作高度在200~400m之间,而对应的激光点距在2×2m~5×5m之间。SHOALS在洁净水域最大可穿透40~50m,沿海地带为20~40m,混浊内陆水域则小于20m。
⒉ CZMIL与SHOALS的性能差异
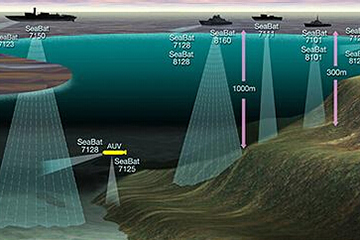
目前的机载激光测系统一般是搭载在固定翼飞机和直升机上。获得的海底地形测量数据可用于航行图、海底地形图、海底障碍物、海底微地形、海岸防护、地形经年变化等方面。
在测深模式下,SHOALS的测量频率为1000Hz,CZMIL系统达10000Hz,在测地模式下,CZMIL可达几万赫兹以上。CZMIL的激光发射频率比SHOALS快10倍,每秒能发射1万次激光脉冲。并且激光的扫描方式也有所不同,SHOALS是以准弧形往返扫描,而CZMIL是以圆周螺旋线形进行扫描。在测深数据密度方面,当飞行高度为400m时,CZMIL的水面视野直径为2m×2m,SHOALS为5m×5m,其密度约为SHOALS的6倍。陆地部分的数据密度为0.7m×0.7m,约为水下部分数据密度的51倍。在同一高度的测量环境下,条带宽度提高1.3倍,可大大提高测量效率。与激光测深数据同时获得提高的还有图像数据,分辨率提高8倍,海岸线等类别的判断更加容易。
在探测深度方面,SHOALS可探测到50m水深,CZMIL系统可达3.75~4倍的圆盘透明度,最浅探测深度可达0.15m,水深测量精度提高到 0.3m以内。见表1。

⒊ CZMIL与SHOALS的特征比较
⑴扫描模式的差异
目前国际上常用的扫描方式主要有两种:类圆锥扫描和直线扫描。以往的机载激光测量激光束的扫描模式是直线往复和圆弧往复式,直线模式结构简单,多被用于陆地激光测量。类圆锥扫描的轨迹为圆形线或圆周螺旋线。与直线扫描方式相比,类圆锥扫描的机械结构简单,运行平稳,适于高速旋转,利于提高测量效率。而机载激光测量需要考虑到水面对激光光线的折射,因此多使用折射角一致的圆弧模式。飞行测量时,高频激光雷达采用横向扫描方式发射,在垂直于飞行方向以数百米的扫描带、很小的扫描间隔进行数据采集,从而达到全覆盖测深的目的。CZMIL的最大特点之一是激光束扫描模式为圆周螺旋线形,这是在圆周上循环的全新的扫描模式。使用圆周螺旋线扫描模型式的特点是在保持了圆弧模式折射角一致这一特点的同时,由于在一条测线上会对相同地点进行2次扫描,因此很少会漏掉可疑物。各种扫描模式示意图见图2。

圆周螺旋线扫描模式是在激光束的发射接收部分设置一个嵌有直径为20cm菲涅尔透镜的圆盘,在发射及接收激光时使光束折射20°,同时旋转该圆盘使之得以实现。圆盘1s旋转27圈,激光发射速率为10000Hz,因此在直径约300m的圆周上可测点为370个。
SHOALS采用的是圆弧形扫描方式,圆弧形扫描通常能够确保一定的入射、折射角,而且在与飞行方向相反的方向通过控制扫描反射镜来修正因飞行速度造成的移动量(圆弧中心的移动量),力求扫描轨迹成平行的圆弧,确保数据的空间密度均匀。这个设备因能获得测点均匀的密度和分布,所以利于保证测量成果的质量。
⑵接收部的差异
CZMIL的接收部的工作原理是,海底反射来的激光光束通过传感器单元底部的菲涅尔透镜传导到传感器单元,接收的激光光束被反射镜分为3组,绿色激光被导入光电倍增管(PMT:PhotomultiplierTube),远红外线激光被导入光电二极管。将其中1组光束保持在能视区域,同时以每60°设置一个波段,形成7个能视区域,记录7个波段的信号。以此类推,将整个能视区域作为1个数据的绿色波段和远红外线波段加以组合,可获取9个波段的信号。关于水深,将所有波段的信号作为1个单元的数据加以处理,对水面的能视区域可分析处理直径2m×2m的水深数据。对于陆地,可以将上述7个分波段的数据作为7个独立的点数据加以分析处理,所以可获取直径为0.7m×0.7m的数据,为此,陆部可以获得非常精准详细的信息。图3是水深数据与陆上数据的视界位置关系图。

SHOALS的激光发射接收子系统包括激光发射和接收器、光束扫描定向装置。发射器发射红外激光(1064nm)和绿色激光(532nm),相应脉宽为7ns和6ns,输出能量大约5mj,均对人眼不产生不良影响,工作温度为0~4℃。可编程扫描器发射激光脉冲沿飞行轨道进行数据采集,动态补偿飞行器的滚动与倾斜。它能在水面产生密集且几乎均匀分布的激光点阵。
⑶数字照相机的差异
CZMIL搭载的T-4800相机系统是16M像素(4872px×3248px)的数字照相机,拍摄照片影像速度达到1秒1次。常规调查时,拍摄速度为每2.5秒1次。拍摄到的数据可同时基于存储的导航数据等实现自动镶嵌及正投影处理。CZMIL实施机载激光测量的常规飞行高度为400m,因此1个像素大约相当于6cm,可制作分辨率非常高的图像。通过叠加激光测量获得的点阵数据,可以绘制详细的岸线及低潮线。
SHOALS通过安在测深仪上的CCD照相机,以每秒一帧的速度连续对海面状况进行拍摄。在获得的数据中,因标有目标的位置信息,所以能大致分辨出照片上拍摄物体的大致位置。利用它的这一功能,可以圈定漏油范围、确认船舶的位置,还可以掌握海上建筑物的情况。
⒋ CZMIL与SHOALS设备安装的差异
在海洋测量方面,只要有新设备出现,日本就是其最早的买家和用户。日本海上保安厅在2000年补充预算中,准许使用机载激光测深仪,2003年2月,加拿大Optech公司生产的SHOALS-1000系统已经成功地应用于日本海上保安厅的机载激光测深当中。
CZMIL安装在日本羽田航空基地所属的DHC8-Q300 型中型飞机MA722“海鹱1号”上。为能装备在羽田航空基地所属的MA725“海鹱2号”上,2014年10月对CZMIL进行了改装,至此,CZMIL可用于两个机型。CZMIL的传感器设置在飞机后部左侧的投放口上部,其前方设置了控制台和操作台,再往前设置了温控台和激光发射接收台。操作员可坐在传感器和控制台之间的椅子上进行操控。
SHOALS可安装在任何中型直升机或固定机翼飞机上。在安装SHOALS作业过程中,装配设备架时要考虑到不要损坏飞机。安装的器材大体分为4个部分:操作台、冷却设备架、激光测深仪架、传感设备。每个部分安装固定完毕后用各种电缆相连接。原则上,按由粗电缆到细电缆的顺序连接。另外,由于SHOALS系统需要更高能量的激光束穿透水层以测量海底,所以SHOALS系统还需要稍大型的飞机提供更多的能量。因此可探深度对SHOALS系统而言是其水下应用的一个重要限制因素。
⒌ 实际应用情况比较
按照SHOALS的使用经验,调查频率是常规的5倍以上,而调查成本仅是常规调查的五分之一。机载激光测深仪一般可以获得8m×8m密度的测深数据,在降低飞行高度的情况下可以获得 2m×2m的数据,同时采用K-GPS基本不受地形阻挡的影响,测深精度满足S44 IHO一级标准,获得高密度和高精度的数据。在浅水区域测量时,密集的数据收集比声波测量更加有效。
2014年6月,CZMIL对日本铫子海实施了精度确认作业和久之滨港至鹿岛港北方的海域调查。根据所获数据可以显示地表的点阵,这些点阵详细地记录了港口建筑物及停泊船舶的形状,重现了与地面垂直的塔的形状,甚至清晰地显现出了空中的电线,获得如此高的点密度,主要是因为圆周型的扫描模式。有望能更详细地掌握水下悬崖及突出物的形状。
与SHOALS相比CZMIL的测深能力更加强大,必将在浅海海域的海洋调查中发挥巨大的威力。
三、对海洋测量新技术的思考
总之,上述两个系统到目前为止都属于已经发展比较成熟的系统,其优势在于可对大范围、沿岸岛礁海区、不可进入地区实现数据的快速获取。而这正是用其他技术方法所无法得到的或是在高昂成本下才能获得的。同时,它们都已完成了大量的近岸海域和内陆水域的测绘工作,并逐步被用于海图制作、碍航物体探测、浅水和危险海域水深测量、海岸带和珊瑚礁的管理、沿岸和海洋资源的管理、环境管理、灾害快速评价、战略防务以及海洋工程等方面。因此,几十年来,此项技术一直受到业内人士的重视,并不断提高改进其软、硬件的功能,探讨如何进一步减小系统的体积、重量,降低能耗,进一步提高探测精度和探测能力,提高识别能力和作业效率。随着其技术的不断发展,机载激光测深仪作为浅水海底地形测量技术的一种补充手段,必将在经济建设中发挥越来越重要的作用。

作者:
郭思海 宋海英 庞云 王贵钢
作者简介:
马兰,1965年生人,女,黑龙江哈尔滨人,硕士,高级工程师,主要从事海洋测绘信息研究。
声明:中国勘测联合网登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考。