2、进阶问题:高精度地图采集
2.1高精度地图采集原理
高精地图有着与传统地图不同的采集原理和数据存储结构。传统地图多依靠拓扑结构和传统数据库存储,将各类现实中的元素作为地图中的对象堆砌于地图上,而将道路存储为路径。在高精地图时代,为了提升存储效率和机器的可读性,地图在存储时被分为了矢量和对象层。
以某一厂商高精度地图为例。该高精度地图基于的是国际通用的OpenDrive规范,并做了一定的修改。一个opendrive节点背后,是一个header节点、road节点与junction节点,每个类型的节点背后还有各自的细分。而道路线、道路连接处、道路对象都从属于road节点下。Junction节点下,有着较为复杂的数据处理方式:通过connection road将不同的两条道路连接起来,从而实现路口的数据呈现。介于路口的类型种类复杂,junction也常常需要多种连接逻辑。Opendrive为高精地图提供了矢量式的存储方式,相比传统的堆叠式容量更省,在未来的云同步方面拥有优势。
图表 7:高精地图矢量数据格式

来源:互联网资料整理
数据采集:实地采集+处理+后续更新。(1)实地采集:高精地图制作的第一步,往往通过采集车的实地采集完成。采集的核心设备为激光雷达,通过激光的反射形成环境点云从而完成对环境各对象的识别。(2)处理:包括人工处理、深度学习的感知算法(图像识别)等。一般来说,采集的设备越精密,采集的数据越完整,所需要算法去降低的不确定性就越低。而采集的数据越不完整,就越需要算法去弥补数据的缺陷;当然也会有更大的误差。(3)后续更新:主要针对道路的修改和突发路况。这一方面有较多的处理方式,比如众包、与政府的实时路况处理部门合作等。
新思路:众包+深度学习。面对高精度地图市场,重资产的传统实地采集模式对于一些初创企业是较难承受的。此时部分初创企业就选择通过众包的方式,利用相对成本较低的普通车载摄像头和相机来采集道路情况,随后再通过深度学习和图像识别算法使之转变为结构化数据。这方面最为成功的企业是Mobileye,而国内的代表有极奥科技等。
众包除了成本较低外,在实时性上也有较大的优势,未来势必会成为高精地图采集体系中的一员。目前,已有通用、日产、丰田、上汽等车厂采用了众包的高精地图采集方式;同时四维图新也于2018年宣布和Mobileye就高精地图的实时众包采集展开合作。
2.2 高精度地图采集设备
高精地图采集所需要的设备包括以下几种。
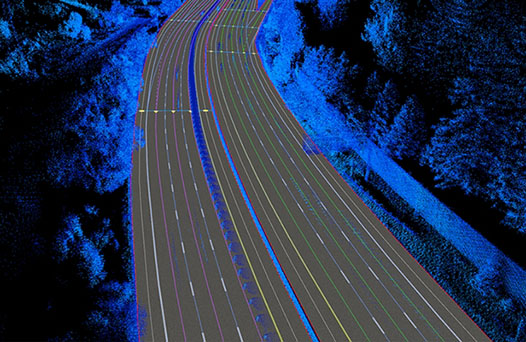
LiDAR(激光雷达)。激光雷达首先通过向目标物体发生一束激光,然后根据接受-反射的时间间隔确定目标物体的实际距离。根据距离及激光发射的角度,通过简单的几何变换可以计算出物体的位置信息。汽车周围环境的结构化存储通过环境点云实现。
激光雷达通过测量光脉冲的飞行时间来判断距离,在测量过程中激光雷达要产生汽车周围的环境点云,这一过程要通过采样完成。一种典型的采样方式是在单个发射器和接收器上在短时间内发射较多的激光脉冲,如在1秒内发射万级到十万级的激光脉冲。脉冲发射后,接触到需要被策略的物体并反射回接收器上。每次反射和接受都可以获得一个点的具体地理坐标。但发射和反射这一行为进行的足够多时,便可以形成环境点云,从而将汽车周围的环境量化。
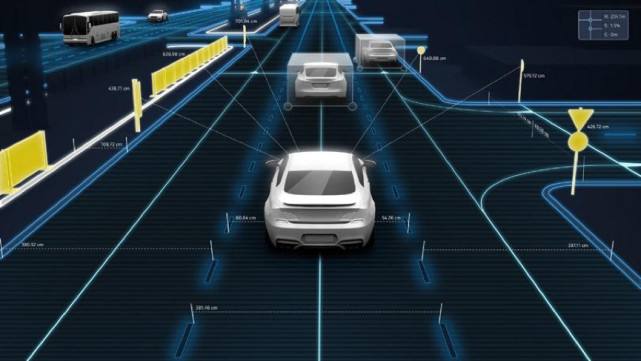
Camera(摄像头)。通过车载摄像头,可以捕捉到路面机器周围交通环境的静态信息,通过对图片中关键交通标志、路面周围关键信息的提取,来完成对地图的初步绘制。车载摄像头是高精度地图的信息采集的关键设备,其主要是通过图像识别和处理的原理来进行。
IMU(惯性测量单元,陀螺仪)。用于测量物体三轴姿态角(或角速率)以及加速度的装置。一般情况下,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺仪,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺仪检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。
GPS(全球定位系统)。GPS接收机的任务就是确定四颗或者更多卫星的位置,并计算出它与每颗卫星之间的距离,然后利用这些信息使用三维空间的三边测量法推算出自己的位置。要使用距离信息进行定位,接收机还必须知道卫星的确切位置。GPS接收机存储有星历,其作用是高速接收机每颗卫星在各个时刻的位置。在大城市中由于高大建筑物的阻拦,GPS多路径发射问题比较明显,这样得到的GPS定位信息容易产生从几十厘米到几米的误差,因此到靠GPS并不能实现精准定位。
轮测距器。通过轮测距器可以推算无人车的位置。在汽车的前轮通常安装了轮测距器,会分别记录左轮与右轮的总转数。通过分析每个时间段左右轮的转数,我们可以推算出车辆向前行驶的距离,以及向左右转了多少度。
高精度地图采集车。高精度地图采集车的装备较为复杂,包括了我们以上提到的多种传感器,来进行道路和静态交通环境数据的采集。下面我们分别介绍ADAS高精度地图采集车和HAD高精度地图采集车的配置情况。以下内容只是一般采集车的配置情况,不同图商的具体设备配置情况可能略有差别。
ADAS地图采集车。ADAS 级别高精度地图精度大约在 50cm 级别。车顶安装有 6 个 CCD 摄像头。其中 5 个摄像头以圆形环绕,顶部一个单独的摄像头,每个像素都是 500 万,总计 3000 万像素。车内副驾驶的位置有用于采集数据的显示屏,机箱在后备箱位置,用于储存和处理数据。
图表8:ADAS地图采集摄像头

来源:互联网资料整理
HAD高精度地图采集车。HAD 及以上高精度地图精度大约在 10cm 级别。顶部则是通过装配 2 个激光雷达(位于后方)和 4 个摄像头(两前两后)的方式来满足所需要的 10cm 级别精度。两种方案搭配,能够完成标牌、障碍物、车道线等道路信息的三维模型搭建。
图表9:HAD采集传感器

来源:互联网资料整理
另外,我们看到百度的高精度地图采集车的传感器配置情况为:(1)最顶部的32线激光雷达、三个360°全景摄像头、一个前置的工业摄像头、一个包含IMU(惯性测量单元,是测量物体三轴姿态角(或角速率)以及加速度的装置)和GPS装置的组合式导航系统以及一个GPS天线。(2)从具体分工来看,激光雷达负责采集点云数据,摄像头负责采集图片,天线负责接受卫星定位信号,导航系统负责采集GPS轨迹。
图表10:采集导航系统

来源:互联网资料整理
图表11:导航系统

来源:互联网资料整理
图表12:GPS天线

来源:互联网资料整理
声明:中国勘测联合网登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考。