4、深度探讨2:高精度地图是否自动驾驶必需?
4.1理解传感器性能的边界
车载传感器的性能边界。自动驾驶核心环节包括感知、决策和控制等。其中感知是通过传感器对周边交通环境数据进行收集和处理。但从目前传感器的性能来看,每一种传感器都有其使用的环境条件和性能的边界。包括:测量范围以及在不同环境下表现出来的感知缺陷。
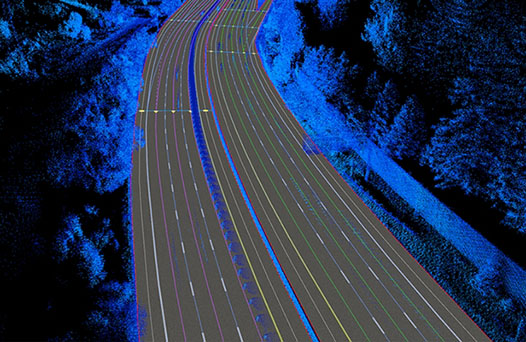
传感器性能边界1:检测范围受限。传感器对周围环境检测的有其固定的范围。例如,长距毫米波雷达探测距离为1-280m,红外线传感器探测距离为0.2-120m,视觉摄像头探测距离为0-80m,中短距毫米波雷达探测距离为0.2-120m,短句毫米波雷达探测距离为0.2-30m,激光雷达探测距离为80-150m。下图为Tesla的传感器配置及传感器感知范围,扇形角度表示传感器的视场角,扇形半径表示传感器的最大检测距离。
图表16:特斯拉配置的传感器最大探测距离

来源:互联网资料整理
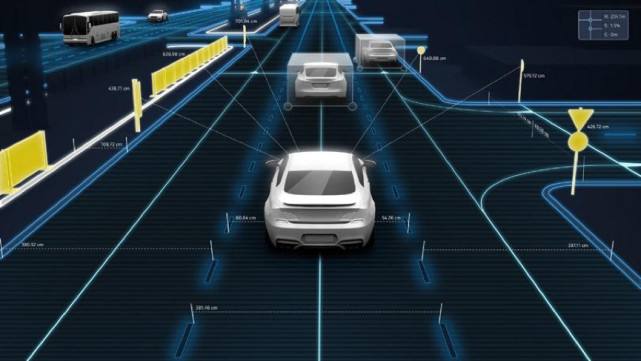
图表17:车身各传感器及其覆盖范围

来源:互联网资料整理
传感器性能边界2:感知缺陷。每一种传感器都有其适用的环境条件。比如激光传感器检测效果稳定,但在面对大范围的尘土时,其检测效果大幅降低;再比如高分辨率摄像机能检测图像中的物体,窄视场的摄像机可以检测很远的距离。但是面对暴雨、大雪等恶劣天气,其很难检测到正确的车道线/障碍物/马路牙子等信息。
图表18:车身各传感器情况概述

来源:互联网资料整理
传感器性能边界3:先验信息缺失。先验信息是指某些可以提前采集且短时间内不会改变的信息。仅仅依靠传感器的信息是很难感知车辆现在是处在高速公路上,还是处在普通城市道路上的;无限速牌的路段,车速最高可以开多快;前方道路的曲率;所处路段的GPS信号强弱,这些都是传感器遇到检测盲区,无法实时捕获的信息。而这些信息是客观存在,不会随外部事物的变化而变化,因此可以提前采集,并作为先验信息传给无人车做决策。图为高精度地图可以为无人车提供的某些先验信息。包括道路曲率、航向、坡度和横坡角。
高精度地图就像自动驾驶汽车的记忆,离开了记忆,无论眼睛和思考速度有多么发达,还是无法对事件有全局把控。一辆能调用高精度地图数据的自动驾驶汽车,能够对所处的环境进行精准预判,提前选择合适的行驶策略,而把对环境的监测重点放在应对突发情况上。在提升车辆安全性的情况下,还有助于降低车载传感器和控制系统的成本。
4.2高精地图与传感器的互补
高精度地图:最稳定的传感器。高精度地图是最稳定的传感器,也是视觉范围最大的传感器。高精度地图可以提供其他传感器很多抽象的信息。同时,对于一般的传感器而言,尽量较少的提供冗余数据(主要是考虑到芯片的处理数据速度);而高精度地图可以提供冗余,第一,当某些传感器数据缺失时,可以利用地图数据进行推算。第二,高精度地图可以用于相互校验,当同一个数据有多个数据来源时,可以校验其他传感器数据的可信度,提高整个系统的准确度。
图表19:高精地图如何发挥作用

来源:互联网资料整理
高精度地图:更好的辅助自动驾驶。通过以上可以看出,高精度地图本身就是一种传感器。其在自动驾驶中的作用在于,如何更好的辅助定位、感知和控制规划。我们可以通过一个应用场景来理解高精度地图中的作用。比如在高速公路下匝道时,一般会通过摄像机来探测车道线的变化,以保证车辆在车道内行驶。在车道弯曲比较大时,摄像机反馈的记过不是很理想,这就需要利用地图的先验数据,根据车辆的姿态来拟合计算车道线的数据。
高精度地图:提升感知算法效率。高精度地图可以提升自动驾驶车载传感器对周围信息的感知算法效率和准确率。(1)传感器通过感知传回加工处理的数据量较大,对芯片处理性能提出较高要求,因此在感知算法时,尽量减少冗余信息。(2)高精度地图的存在,可以利用其去掉地图中固有的标志物信息,让有限的计算资源集中在道路上可能对自动驾驶带来影响的动态物体。
高精度地图:静态对象识别。高精度地图对静态物体的标识可以部分程度上弥补传感器面对静态物体失灵的情况。在2018年3月23日加州发生的特斯拉Model X致死案中,特斯拉的Autopilot没有检测到混凝土分隔物,并撞击上了路边的混凝土分隔物已经冲撞衰减设施,最终导致了车辆起火和驾驶员死亡。倘若有包含完整道路对象的高精地图的话,车辆在自动驾驶的路径规划阶段就不会有撞上路边混凝土的可能性,从而也能避免类似的事故。
在特斯拉的Autopilot套件中,“匝道入口”与“匝道出口”两项功能是其一直承诺但又很长时间没有实现的。Autopilot虽然在高速公路上表现稳定,但却在匝道口处表现不佳,甚至出现过多次事故。在目前L3水平的自动驾驶中,如果没有高精地图的车道线信息,无法解决匝道口行驶的问题。但倘若后续高精地图的配备和云同步功能足够完善的话,自动驾驶算法结合高精地图对匝道的识别是能够较好地解决这一问题。高精地图能够弥补传感器检测范围受限和先验信息缺失的缺陷,并能够部分程度上弥补传感器的感知缺陷,在标识静态对象的同时解放传感器去专注于动态对象。
全篇总结
1、IT技术的变革,会使得IT产品的使用对象发生变化,高精度地图就是如此。在自动驾驶出现之前,传统的电子导航地图的使用对象是车主(人),而在自动驾驶环境下,高精度地图的使用对象是自动驾驶系统(车)。使用对象的改变,使得产品设计、迭代周期、呈现方式都会发生变化。
2、数据实时的重要性。信息技术的不断更新,我们会发现我们对数据实时性的要求越来越高。特别是当读取数据的主体发生变化时,比如从人切换到机器,数据的实时性要求会更高。对于高精度地图更是如此,只有实时更新的数据才能够确保机器处理的是最新的道路信息,也就是说,在机器对数据处理链条中,确保Input的数据是正确的,Output的处理结果才能更加有效。
3、对于某些IT业务,其性质就决定了门槛。在分析某些业务时,我们很直观的第一反应就是分析竞争格局,是不是有门槛。而有些IT业务,其业务的性质可能就决定了其门槛。比如对于云服务的IaaS业务,这个业务某种程度来说,是一个重资产的业务,只有IT巨头才有能力来做大做强这个业务。对于高精度地图而言,我们认为也是如此。其本身就是需要大量的研发投入,不只是在采集车辆的固定成本方面,对后期的处理也是不小的一笔费用。更不用于说产品出来之后,要不断与Tier1 和前装车厂相应的产品不断测试和适配,对于一般的小企业或者跨界企业而言,想进入非常难。因此,我们认为,高精度地图最终也就只有两三家厂商有实力对其进行持续投入和研发。
4、数据冗余不一定都是坏事。在一般的IT系统中,我们都希望IT系统处理的信息越精简越好,因为在现有有限的计算能力或者计算速度下,输入的信息越精简,处理所需要的时间越短,结果的呈现也就越实时。对于智能驾驶而言,其计算资源更加有限,对于车辆产生的实时信息,我们希望尽量减少冗余。但减少冗余所付出的代价是,处理结果不一定与现实环境相匹配。因此,在有些时候,冗余的数据和信息并非坏事,而是在某些特定的约束条件下(比如计算能力约束),我们不希望其出现。在自动驾驶领域,高精度地图可以在不占用计算资源的情况下,其“冗余”信息可以对外部环境进行真实刻画。
声明:中国勘测联合网登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考。