无人机低空遥感技术是航空遥感领域一个新的发展方向,具有低成本、快捷、灵活机动,以及数据高时效、高分辨率等特点。本文以无人机低空遥感在黑河流域中游张掖的应用为例,介绍了无人机低空遥感系统的基本构成,论述了影像数据的获取、影像的匀色、特征点的提取与匹配、几何纠正与镶嵌、DTM和DOM的生成等处理流程与分析方法。实验结果表明,无人机低空遥感系统能够满足局部区域内的高分辨率、大比例尺基础数据采集的实际需求,在三维重建、土地调查、环境监测等领域具有良好的应用前景。
引言
随着经济建设步伐的加快,地表形态也在发生巨大变化,因此需要一种能对空间基础数据快速获取与实时更新的有效手段。为满足数据更新中大比例尺制图、精细三维模型和真正射影像的生成,以卫星和飞机为平台的航空摄影测量在国家地形图及地理信息数据库等重要数据源的获取与更新中起着不可替代的作用[1],但是由于成像间隔、云层遮挡等因素影响很难获取合格影像,且其更新效率和及时性比较差[2]。随着无人机与数码相机技术的发展,基于无人机平台的低空摄影测量凭借其低成本、快捷、灵活机动、高分辨率等特点,已经成为航空摄影测量的有效补充手段,且在应急数据获取与小区域低空测绘方面有着广阔的应用前景。
近年来,无人机低空遥感系统具备了可自动化、智能化、专题化的快速获取国土、资源、环境等相关空间遥感信息的能力,并能完成遥感数据处理、建模和应用分析等。特别针对无人机低空影像的自动化快速处理方法的研究,使无人机低空摄影测量在小区域内高精度的基础数据更新与获取中起到很大作用[3]。我国西北部的黑河流域具有西北干旱区域内陆河的典型特点, 从高山冰川/永久积雪、森林、草地到平原绿洲和戈壁荒漠,构成一个完整的干旱区自然生态景观[4]。为了建立我国内陆河流域科学观测-试验、数据-模拟研究平台,认识内陆河流域生态系统与水文系统相互作用的过程和机理,建立流域生态-水文过程模型和水资源管理决策支持系统[5,6,7],国家基金委将黑河流域作为我国生态-水文过程集成研究的重点区域,并设立了重大研究计划项目[8],其高质量的基础数据为最后的试验提供重要的保证。位于黑河流域中游的张掖是整个项目中的重要研究区域具有重要地位,为了更好展开区域内的系列科学试验与研究,需要获取该区域高分辨率、高精度的精细三维模型和数字正射影像。文中描述了基于无人机低空摄影测量系统的数据采集和处理流程,针对拍摄影像进行了基于地面控制并以外方位元素为约束的影像匹配,并利用地面控制点的区域网光束平差,生成高精度的三维模型和正射影像,并对最终结果进行精度评价与分析,最后探讨了无人机低空摄影测量在高精度基础数据获取与数据更新中的应用。
1 试验概况与无人机低空遥感系统
为配合2012-2015年在黑河流域开展的卫星和航空遥感及地面观测互相配合的多尺度综合观测试验,即“黑河流域生态—水文过程综合遥感观测联合试验”(HiWATER-Heihe Watershed Allied Telemetry Experimental Research,黑河生态水文遥感试验) [9],特别是为张掖核心区域传感器的密集布设与规划,于2011年11月对该区域进行低空无人机数据采集。其飞行区域面积约为45.2 km2,以城镇和农田为主,地势较平坦且整体为西南高东北低,高程范围为1490-1620m。
本次试验在无人机平台搭载的传感器为普通单反相机Canon 5D MarkII,焦距为35mm。 其飞行区域的地理分布如图1所示为。无人机低空遥感系统主要由三部分组成[2],分别为无人机飞行平台系统,地面控制系统和数据处理系统(如图2所示)。飞行平台系统将飞行信息传输给地面控制系统,从而工作人员可以实时监控无人机的飞行情况,在必要的情况下,可以更改飞行计划,例如进行补拍,或者切换成手控飞行等。
 图1 研究区域甘肃省张掖市(黄色框内为实验区域)
图1 研究区域甘肃省张掖市(黄色框内为实验区域)
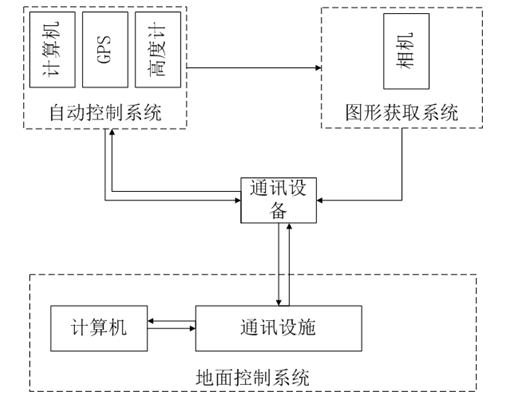
图2 无人机遥感平台构成
2 无人机遥感影像获取与地面测量
2.1 影像数据的获取
无人机低空遥感系统自动获取影像的流程为:预先对待拍摄地区进行航线设计,将规划好航线载入飞行控制系统。地面控制系统按照规划的航线控制无人机飞行,图像获取系统则进行拍摄和存储数据。其中,在航线设计中需要根据地面成像空间分辨率来进行规划,主要考虑因素有:相机镜头焦距、飞行航高、及其航向与旁向重叠度等。
本试验于2011年11月对研究区域进行影像数据的采集,共拍摄132张影像,飞行航线为6条(如图4所示),飞行航高平均为2400m,航向与旁向重叠度分别约为65%、35%,获取影像对应地面空间分辨率约为0.5m,其拍摄原始影像如图3所示。
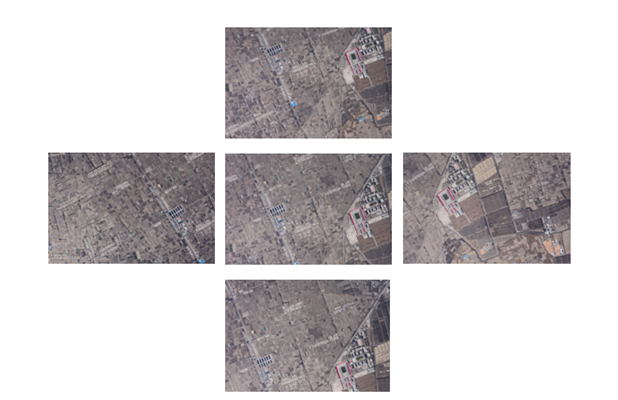
图3 无人机拍摄的相邻5幅图像
2.2 地面控制点的选取与测量
为对影像进行绝对定位和地理配准,提高空三解算中的绝对定位精度,并对最终成果进行质量检验,于2012年8月利用GPS-RTK定位技术对区域内地面控制点进行选取与采集。由于该试验区以村庄、农田为主,具有明显的地面特征(如房屋角点、道路交叉点等),因此在区域内选取稳健的地物特征点为地面控制点,且在区域内均匀分布(如图4所示)。

图4 航线设计、控制点与检核点分布
3 无人机遥感影像的处理
无人机低空摄影测量的影像处理步骤通常为:相机检校、量测同名点、空中三角测量、正射纠正等等。无人机在数据采集过程中虽使用GPS/IMU系统获取每张影像拍摄时的外方参数,但是由于该系统精度较低,通常在空三解算时需要利用一定数量的地面控制点来纠正影像拍摄时外方参数来提高地面定位精度同时也可对影像进行几何纠正,而地面控制点的采集耗时、耗力,采用区域光束平差法可利用少量的地面控制点达到区域最优。
3.1 相机检校
由于无人机通常通过搭载的普通单反相机来获取影像,其相机畸变较大,需要对相机的畸变参数来进行检校,进而纠正几何精度。其相机检校参数一般包括:像主点位置(x0,y0),主焦距(f),及其径向畸变和偏心畸变。径向畸变差使构像点沿向径方向偏离其准确位置; 而偏心畸变差是由于镜头光学中心与几何中心不一致引起的误差, 它使构像点沿向径方向和垂直于向径方向都偏离其正确位置。通常采用的检校方法有基于直接线性变换的检校、基于模型平面的张正友标定法(1998)等。本文的相机检校参数如表1所示。

表1 相机的检校参数
3.2 同名点的自动量测
由GPS与IMU获取的外方位元素和标定的相机参数可用来初步构成无人机低空遥感拍摄时的成像模型,并固定每张影像之间的位置。然后根据特征点的自动匹配策略,以影像POS、相机参数等为约束条件来自动匹配出像对之间的同名点。在遥感影像的图像匹配中,常用匹配算法有基于灰度匹配的最小二乘匹配[10],基于特征匹配的SIFT[11],SURF[12]算法等。当无人机低空飞行获取高分辨率遥感影像时,由于不同摄站点拍摄角度不同,使得建筑物等凸出地面的物体在立体像对上成像时产生投影差,导致物体成像几何形状发生畸变并且出现地面高层建筑物之间遮挡现象的问题,从而导致匹配困难,这成为影响无人机航空遥感影像匹配质量的主要因素[13]。本文采用对旋转、遮挡、缩放、图像局部灰度变化等都具有较强的稳定性的SIFT算法来进行匹配并以影像外方元素为约束,共获取4800多个同名点,同名点均匀分布于相邻影像的重叠区域,符合区域网平差的要求。由于初始外方位元素的误差,造成了一定数量的误匹配,为提高实验最终匹配精度,实验中剔除了匹配误差较大的匹配点来提高同名点的准确度,并利用精度最佳同名点通过空三解算来纠正初始外方元素,进而以纠正后精度较高外方为约束再进行密集匹配,从而得到精度较高的密集同名点。
3.3 空中三角测量
实验中基于地面控制点和同名点进行空三解算,来纠正各张相片的外方位元素。采用的误差方程方程式如下[14]:
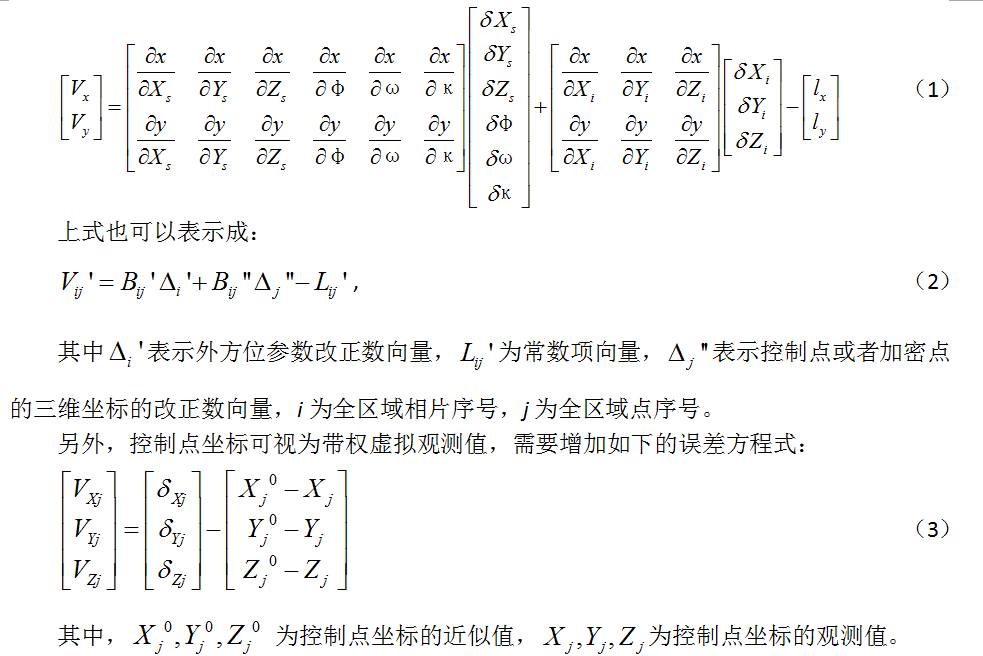
根据地面控制点的分类:平面控制点、高程控制点和平高控制点等,在实际GCP(地面控制点)采集过程中通常选取在影像上具有明显的、清晰的定位识别标志,如房角点、道路交叉点、河流叉口、建筑边界、农田界线等。但在影像处理过程中,影像与实际存在局部差异,如房角点在局部高差变化较大常用作平面控制点,道路交叉点在局部平面位移比较大常用作高程控制点。实验中选取了19个平面控制点,8个高程控制点,6个平面检核点和6个高程检核点,其分布情况如图4所示。试验空三的定位精度如表1所示,其结果表明空间定位精度较高。

表2 空中三角测量精度
3.4 正射纠正与镶嵌
获取了DTM和纠正后的相片外方位元素之后,可以对每一张相片进行正射纠正。正射纠正包括倾斜改正和投影差改正,纠正后的影像经过裁剪、镶嵌得到最终的DOM,在镶嵌过程中对拼接线进行必要的羽化处理。图5所示为正射影像拼接的过程,图6中为镶嵌完成的数字正射模型。
对照影像可以发现,航片、航带之间都存在颜色、明暗之间的差异,这可能是因为天气、云雾等客观因素所致,或者是太阳光的投射角度不同、地物的差异以及相机本身曝光的不均匀等因素。因此必须对获取影像进行匀光匀色,以保证影像在纹理、亮度、色相等特性上保持较好的一致性,使各自然分幅图达到无缝拼接的目的。
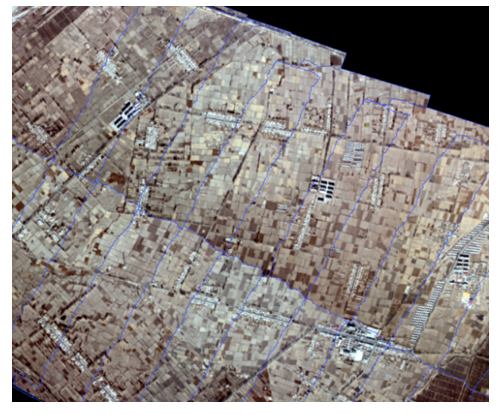
图5 影像镶嵌
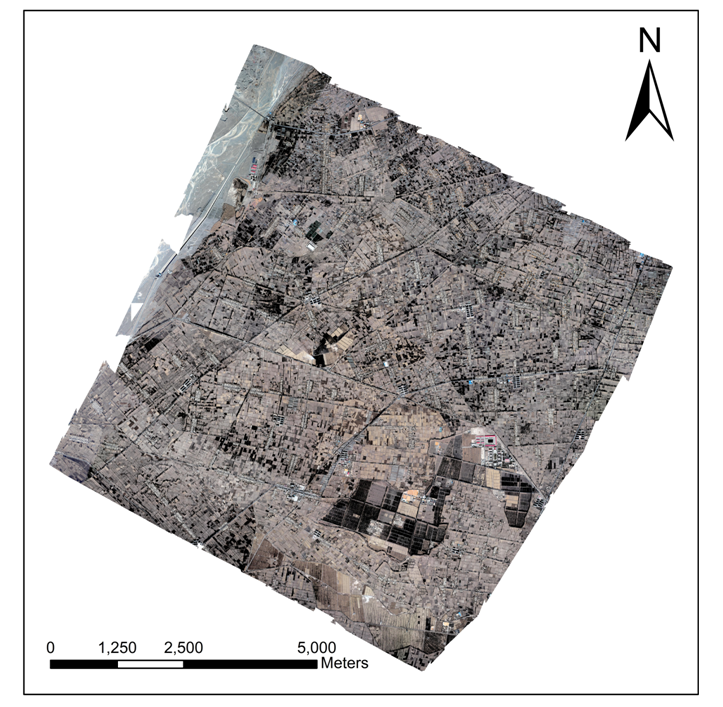
图6正射影像镶嵌获取的DOM
3.5 精度评价
为了验证生成的数字正射模型和地形模型的精度,选取了6个平面检核点和6个高程检核点,通过量测控制点在图像上的坐标与实测坐标进行对比,结果见表3,实验中DOM的X方向中误差为0.47米,y 方向中误差为0.53米,证明生成的正射模型精度较为理想。DTM的高程中误差为1.09米,这是由于研究区域地形复杂,采集的控制点多为房屋角点,这些控制点在局部范围内高程变化较大。
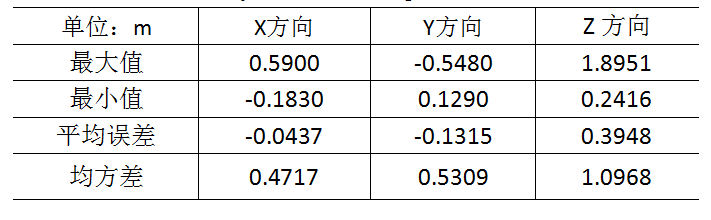
表3 DOM和DTM精度检查表
4 结语
随着无人机航拍设备性能与数据处理技术的快速提升,无人机低空遥感技术已经成为传统航空摄影测量的有效补充手段,成为航空遥感领域新的发展方向,且在应急数据获取与小区域内大比例尺基础数据获取与数据更新方面有着广阔的应用前景。
为了获取位于黑河流域中游的张掖高分辨率、高精度的精细三维模型和数字正射影像,服务于“黑河流域生态—水文过程综合遥感观测联合试验”的国家重大科学研究。文中描述了基于无人机低空摄影测量系统的数据采集,与基于地面控制和外方位元素约束的影像匹配、区域网光束平差等处理方法,最终生成高精度的三维模型和正射影像。实验表明无人机低空遥感在大尺度制图与三维重建等方面具有很大的潜力。然而,由于无人机平台体积小、载重有限,姿态定位较容易受环境的影响,另外采集的影像幅宽较小、重叠度和畸变较大。针对其大量影像数据的自动化与专题化的处理与应用,还需要进一步的深入研究。
参考文献
[1]杨瑞奇, 孙健, 张勇. 基于无人机数字航摄系统的快速测绘[J]. 遥感信息, 2010, 03: 108-111.
[2]Liu X, Chen P, Tong X, et al. UAV-based low-altitude aerial photogrammetric application in mine areas measurement[C]. 2012 Second International Workshop on Earth Observation and Remote Sensing Applications (EORSA), 2012: 240-242.
[3]Van Blyenburgh P. UAVs: an overview[J]. Air & Space Europe, 1999, 1(5): 43-47.
[4]张志强, 徐中民, 王建, 等..黑河流域生态系统服务的价值[J].冰川冻土, 2011, 23(4): 360-366.
[5]李新,马明国, 王建, 等..黑河流域遥感—地面观测同步试验:科学目标与试验方案[J]. 地球科学进展,2008,23(9):897-914.
[6]Li, X.,Li, X.W.,Li, Z. Y.,et al. Watershed allied telemetry experimental research[J].Journal of Geophysical Research, 2009, 114(D22).
[7]李新, 刘强, 柳钦火, 王建, 马明国, 肖青, 车涛, 晋锐, 冉有华. 黑河综合遥感联合试验研究进展:水文与生态参量遥感反演与估算[J]. 遥感技术与应用, 2012,05: 650-662.
[8]马明国. 黑河综合遥感联合试验地面观测数据质量控制与评价[J]. 遥感技术与应用, 2010, 25(6): 766-771.
[9]李新, 刘绍民, 马明国, 等. 黑河流域生态—水文过程综合遥感观测联合试验总体设计[J]. 地球科学进展, 2012, 27(5): 481-498.
[10]Ackermann F. Digital image correlation: performance and potential application in photogrammetry[J]. The Photogrammetric Record, 1984, 11(64): 429-439.
[11]Lingua A, Marenchino D, Nex F. Performance analysis of the SIFT operator for automatic feature extraction and matching in photogrammetric applications[J]. Sensors, 2009, 9(5): 3745-3766.
[12]闫利, 陈林. 一种改进的SURF及其在遥感影像匹配中的应用[J]. 武汉大学学报(信息科学版), 2013, 07: 770-773+804.
[13]索效荣, 齐苑辰. 基于SIFT算法的无人机航空遥感影像匹配[J]. 测绘科学, 2012, 01: 89-91+103.
[14]李德仁, 郑肇葆. 解析摄影测量学[M]. 测绘出版社, 1992: 159-162.
作者:陈杰1,童小华1,刘向锋1,张松林1,李天鹏1,马明国2
(1.同济大学测绘与地理信息学院,上海 200092;2. 中国科学院寒区旱区环境与工程研究所, 甘肃 兰州 730000)
声明:中国勘测联合网登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考。


