陈坡1,2,孙付平1,韩雪峰1,周本才2
(1.解放军信息工程大学导航与空天目标工程学院,河南郑州450001; 2.96267 部队,河南宜阳473000)
1.引言
北斗卫星导航系统( Beidou satellite navigationsystem,BDS)是我国正在实施的自主发展,独立运作的全球卫星导航系统,目前已具备亚太区域导航服务能力。基于载波相位观测量的定位解算可以获得较高的精度,但是这涉及到整周模糊度的确定和处理,实时性较差。针对交通运输等需要实时提供导航定位服务的用户来说,更关心的是基于伪距的单点定位的精度,但是伪距单点定位的精度受卫星轨道、卫星钟差、电离层及对流层误差等因素的影响。北斗导航系统是由三种处于不同轨道高度的异质卫星组成的混合星座导航系统,由于卫星测距精度与卫星星历相关,而不同轨道上的轨道误差对卫星星历又会产生不同的影响,因此,在分析和评估北斗卫星导航系统单点定位精度时,必须考虑不同轨道卫星测距精度的差异影响。
为了测试分析北斗导航系统导航定位精度,首先对加权定义方法进行阐述,并给出了影响导航定位精度的误差模型改正方法,然后利用国内某知名厂商生产的BDS 基本型导航接收机进行车载动态数据的采集与处理,最后对测试结果进行了分析。试验结果表明:目前北斗导航系统的单点定位精度已经达到了10m 以内,满足用户需求,也说明了采用加权定位方法参与导航解算的正确性和合理性。
北斗卫星导航系统伪距测量误差主要与卫星星历和钟差误差,传播过程中大气延迟和多路径效应误差,接收机内部测距码分辨率误差及测量噪声相关。由于星座类型不同导致卫星定轨误差和外推误差不同,这就造成了不同轨道卫星发播的广播星历精度不等,从而造成了伪距观测量精度的不等。对于地球同步轨道(GEO) 卫星,其静止特性使得卫星的钟差在定轨中难以分离,并且GEO 卫星受光压影响较大,外推时间不能过长等因素,因此由GEO卫星星历误差引起测距误差在相同条件下约为中等高度轨道(MEO)卫星的2 倍。倾斜地球同步轨道(IGSO)卫星轨道高度与GEO 相同,受光压影响也较大,但是在局部地区其定轨精度比GEO 和MEO 要高,因此综合考虑IGSO 测距精度与MEO
相当。
组成误差方程为:
组成误差方程为:

线性化点指向第i 颗卫星位置的单位矢量; δX =( δx,δy,δz,cδt),( δx,δy,δz)为接收机坐标的改正数;δt 为接收机钟差。

值得注意的是:IGSO 和GEO 卫星的位置计算方法与GPS 类似,GEO 卫星的位置计算要考虑轨道倾角。

3.误差处理模型
为了尽可能提高北斗导航卫星单点定位精度,需要建立准确的误差改正模型,具体如下。
为了尽可能提高北斗导航卫星单点定位精度,需要建立准确的误差改正模型,具体如下。
卫星钟差一般通过对卫星钟运行状态进行连续监测而精确确定,相对论效应中的狭义相对论可以通过设置卫星钟的频率来消除,广义相对论可以通过模型进行改正。卫星钟差和相对论效应的综合影响可以表示为:
式中,Δtr = Fe√Asin Ek是相对论校正,A、e、Ek分别为卫星运动长半轴、偏心率和偏近点角。参数详细描述见参考文献[8][10],这些参数均可以从导航电文中获取。
目前,消除电离层延迟误差的方法可以分为两种:一种是双频伪距消电离层法,主要适合于双频观测量,精度较高;另一种是电离层延迟模型改正法,适合于单频观测量。由于本文采用的是基本型北斗导航用户接收机,仅能接收到B3 频点数据,因此在后续的导航解算中,针对B3 单频观测量采用Klobuchar 模型,具体公式参考文献[8]。
针对对流层延迟模型改正,这里采用Hopfield模型,具体公式参考文献[12]。
还需要考虑地球自转对信号传播的影响,此外在进行测试评估时,北斗导航接收机还应远离折射或发射比较严重的区域,以减小多路径误差的影响。
4.试验及结果分析
4.1 试验流程
为了准确评价北斗导航系统导航定位精度,在郑州市环城路进行车载试验,道路两旁遮挡物较少,可以满足测试需求:试验时间为2012 年8 月中旬,分为三个时间段进行测试,分别为06∶ 00—08∶ 00,12∶ 00—14 ∶ 00,18 ∶ 00—20 ∶ 00。具体试验流程为:
(1)在基准站架设双频GPS 基准站设备,在试验车上分别架设GPS 接收机天线和BDS 接收机天线,测量出天线间的相对位置参数,便于进行归心改正;
(2)沿着预先设定的路线,进行测试,采样间隔为1s,试验车速度不大于120km/h;
(3)基准站、车载测试系统分别记录GPS 载波相位、伪距等原始观测数据,车载测试系统还记录BDS 接收机输出的原始信息;
(4)利用基准站和车载测试系统GPS 测量数据进行高精度计算;利用自编软件对BDS 原始数据进行导航解算;
(5)考虑时间归算及坐标归算后,将解算的BDS 导航定位结果与高精度GPS 结果进行比对。
需要注意的是由于北斗卫星导航系统与GPS相比,坐标基准和时间基准都不同,但是相关文献表明:WGS 84 与CGCS 2000 坐标系统的差在厘米量级,GPST 与BDT 的时间差维持在1μs 内,相对于中低动态载体来说,对其位置和速度的影响都可以忽略不计。在测试过程中,由于行驶路线较远,为了更加准确地对定位性能进行分析,将数据存储后进行事后GPS 高精度解算。

测得的坐标值;BGPS、LGPS为GPS 测得点位的纬度和经度值。
4.2 计算与分析
在利用自编软件进行导航解算时,采用前面叙述的加权定位方法,并采用Kalman 滤波建立P - V- A 模型进行导航解算。

在时间段一内:图1 中给出了车辆测试过程中可视北斗导航卫星的个数及对应的PDOP 值及东、北、天三个方向的误差趋势图。
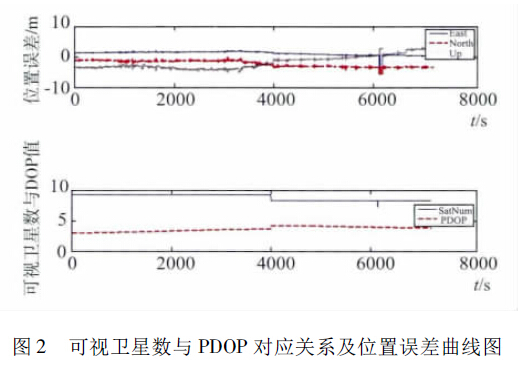
在时间段二内:图2 给出了车辆测试过程中可视北斗导航卫星的个数及对应的PDOP 值及东、北、天三个方向的误差趋势。
在时间段三内:图3 给出了车辆测试过程中可视北斗导航卫星的个数及对应的PDOP 值及东、北、天三个方向的误差趋势。


表1 给出了利用自编软件与接收机内部软件在三个测试时间段内定位误差对应的最大值和均方根。
从图1 ~ 3 和表1 可以看出:
可视卫星数对PDOP 值影响较大,当可视卫星数变化时,PDOP 值也随之变化;当PDOP 值发生跳变时,定位精度随着变化;在东向上定位精度明显优于北向和天向方向,而北向定位精度又好于天向方向;在三个测试时间段内,东向最大误差为4. 79m,北向最大误差为6. 03m,天向最大误差为10. 98m;在第一个测试时间段内,可视卫星数变化较为频繁,导致定位精度出现较大的跳变,但总体趋势仍处于平稳状态;对测试结果进行统计分析发现,基于95%的统计模型下,水平定位精度在5m 以下,高程方向也优于10m,可以满足交通等用。
在整个测试过程中,我们发现利用自编软件得到的导航结果整体优于北斗接收机利用内部软件解算得到的结果,这说明了采用加权定位算法的优越性和可靠性。
针对某些跳变结果,下一步将采用抗差滤波、自适应滤波等算法进行导航定位解算,以得到更加平滑的导航定位结果。由于设备等原因,目前仅对单频B3 数据进行处理,而B1B3 双频数据的导航结果预计会好于B3 单频的。
5.结束语
本文针对我国正在建设的北斗卫星导航系统进行单点实时精度测试评估,得到以下的结论。
(1)在北斗卫星导航解算中,要采用加权定位方法,导航定位结果更为可靠。
(2)目前,北斗卫星导航系统在我国中部地区已经可以保证有足够的可视卫星数,并且可视卫星数的几何结构较好,水平定位精度在测试时间段内可以达到5m 以内,高程精度可以达到10m 以内,可以满足交通等用户的需求。
(3)在后续的研究,要对双频数据进行测试分析,期望得到精度更高的导航结果。
(4)随着北斗导航卫星由区域向全球的扩展,可视卫星数进一步增多,区域内的导航定位精度也会得到进一步的提高。
参考文献:
[1] 杨元喜. 北斗卫星导航系统的进展、贡献与挑战[J].测绘学报,2010,39(1):1-6.
[2] 范龙,柴洪洲. 北斗二代卫星导航系统定位精度分析方法研究[J]. 海洋测绘,2009,29(1):25-27.
[3] 牛作鹏,张书毕,张丽. 星历精度对GPS 单点定位的影响[J]. 海洋测绘,2010,30(4):57-59.
[4] Kaplan E D,Hegarty C J. Understanding GPS Principlesand applictions[M]. London: Artech House,2006.
[5] 高星伟,过静珺,程鹏飞,等. 基于时空系统统一的北斗与GPS 融合定位[J]. 测绘学报,2012,41(5):743-748.
[6] 王梦丽,孙广富,王飞雪,等. 混合星座导航系统的加权几何精度因子分析[J]. 中国空间科学技术,2007(5):50-55.
[7] 杨元喜. 自适应动态导航定位[M]. 北京:测绘出版社,2006.
[8] 党亚民,秘金钟,成英燕. 全球导航卫星系统原理与应用[M]. 北京:测绘出版社,2007.
[9] 谭述森. 卫星导航定位工程[M]. 2 版. 北京:国防工业出版社,2010.
[10] 李超. BD - 2 用户端导航定位算法研究及软件实现[D]. 郑州:解放军信息工程大学,2007.
[11] 于胜利. 区域卫星导航系统定位授时试验数据分析[D]. 郑州:解放军信息工程大学,2012.
[12] 鲁郁. GPS 全球定位接收机———原理与软件实现[M]. 北京: 电子工业出版社,2009.
声明:中国勘测联合网登载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考。








